
填补L2至L4功能测试鸿沟之车路协同篇:基于场地车辆在环的C-V2X功能测试
1. 车辆高速直行,目标车静止(CCRHs)
2. 车辆直行,目标车穿行(SCP)
3. 车辆直行,目标车辆穿行,含遮挡(SCPO)
4. 车辆左转,目标车对向直行(CCFT)
5. 交通信号识别系统(TSR)

但外场道路C-V2X测试还需面对诸多挑战,例如:
1. 外场道路测试交通场景单一
2. 极限场景无法百分百复现,例如大规模压力测试
3. 成本高昂,需要路侧单元以及目标物部署
而选择通过虚实结合的方式,将仿真系统与待测整车进行联调,可以高效地实现场景的复现和泛化。
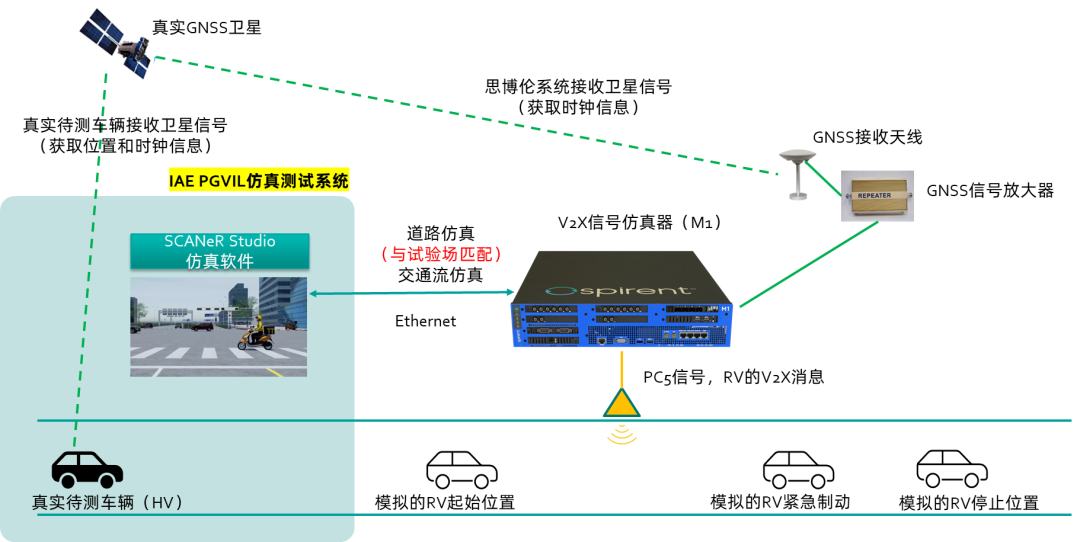
本次测试中采用的核心产品:PGVIL场地车辆在环仿真测试系统和C-V2X M1信号仿真器:
PGVIL场地车辆在环测试方案
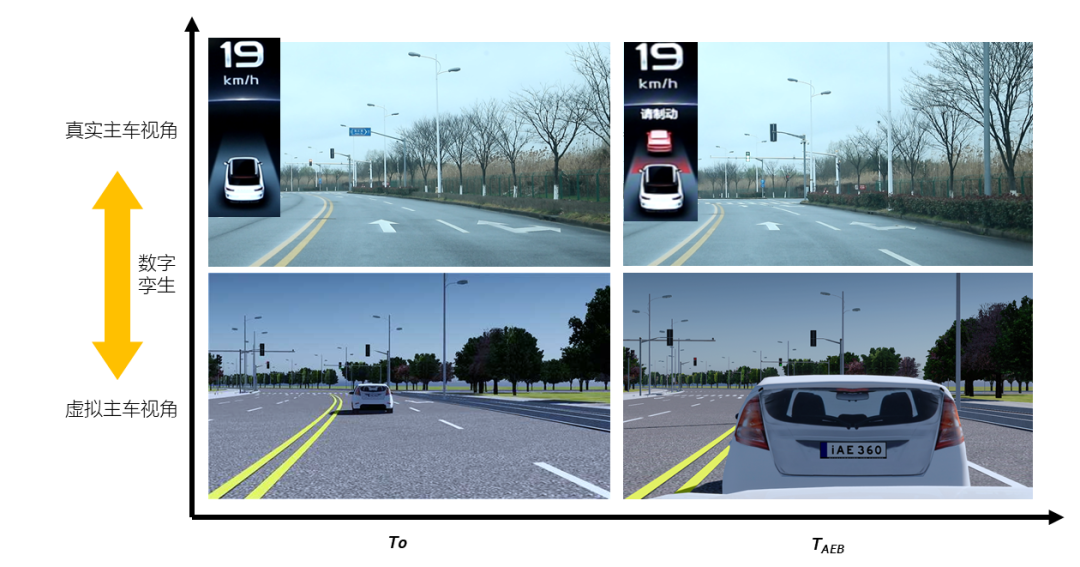
作为IAE X-In-Loop技术及解决方案体系的重要一环,PGVIL将数字孪生虚拟场景和试验场测试相结合,将仿真生成虚拟场景注入至真实控制器,触发智能驾驶功能,能够更有针对性的对智驾执行机构进行评测,用于车辆标定和智能驾驶功能评估。
- 丰富的试验场测试场景
- 可降低对实体目标物数量和质量的依赖
- 有效提升测试效率和测试重复性
C-V2X M1信号仿真器
1.业界首款针对C-V2X测试用途设计的专业仪表
2.基于网络测试行业的权威仪表STC平台,计算能力强大,未来可扩充至更复杂的测试中
3.输入输出接口:
- 8路可独立控制的C-V2X射频,可仿真数百个车辆(OBU)
- 4路10G以太网
- 2路CAN/CANFD
- 1路GNSS信号
