
Crab智驾场景认知炼金引擎:自动驾驶场景数据闭环的跃迁
然而在智能驾驶技术迭代的深水区,传统自然驾驶场景构建范式正遭遇三重困境:
1. 原始数据问题无法有效修复,生成场景质量低;
2. 面对海量数据,场景提取难度高,场景生成效率低;
3. 生成场景无法有效进行特征提取和场景分类,去重工作困难,测试效率难以提升。
DeepOCEAN.AI仿真平台的Crab自然驾驶场景处理工具通过三层引擎实现范式突破:
1. 数据炼金层
搭载强大的数据清洗功能,能够自动识别并剔除数据中的噪声、异常值和重复数据、平滑轨迹、目标物合并及补帧等,确保清洗后的数据质量满足高质量场景构建要求。
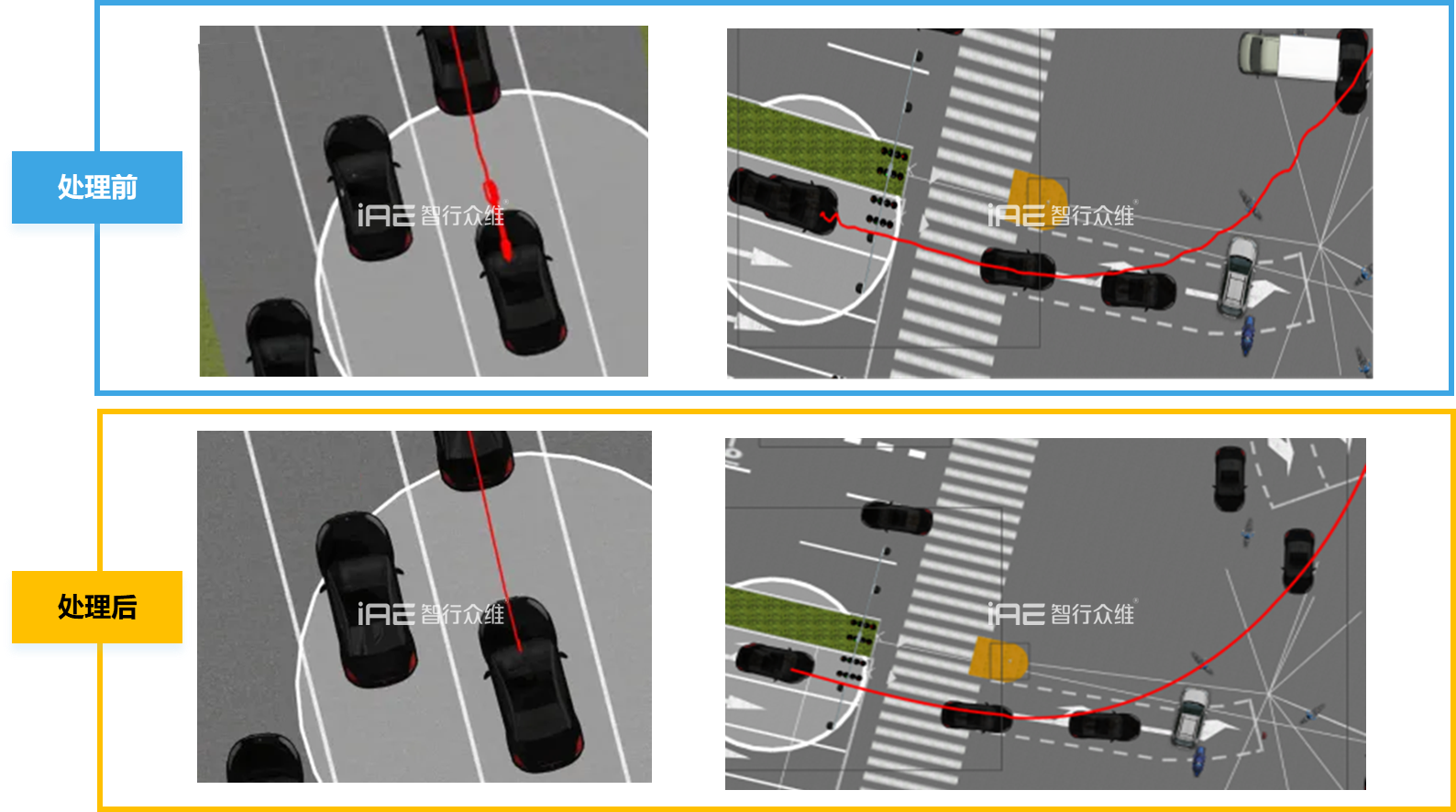
Crab功能:自动轨迹平滑效果
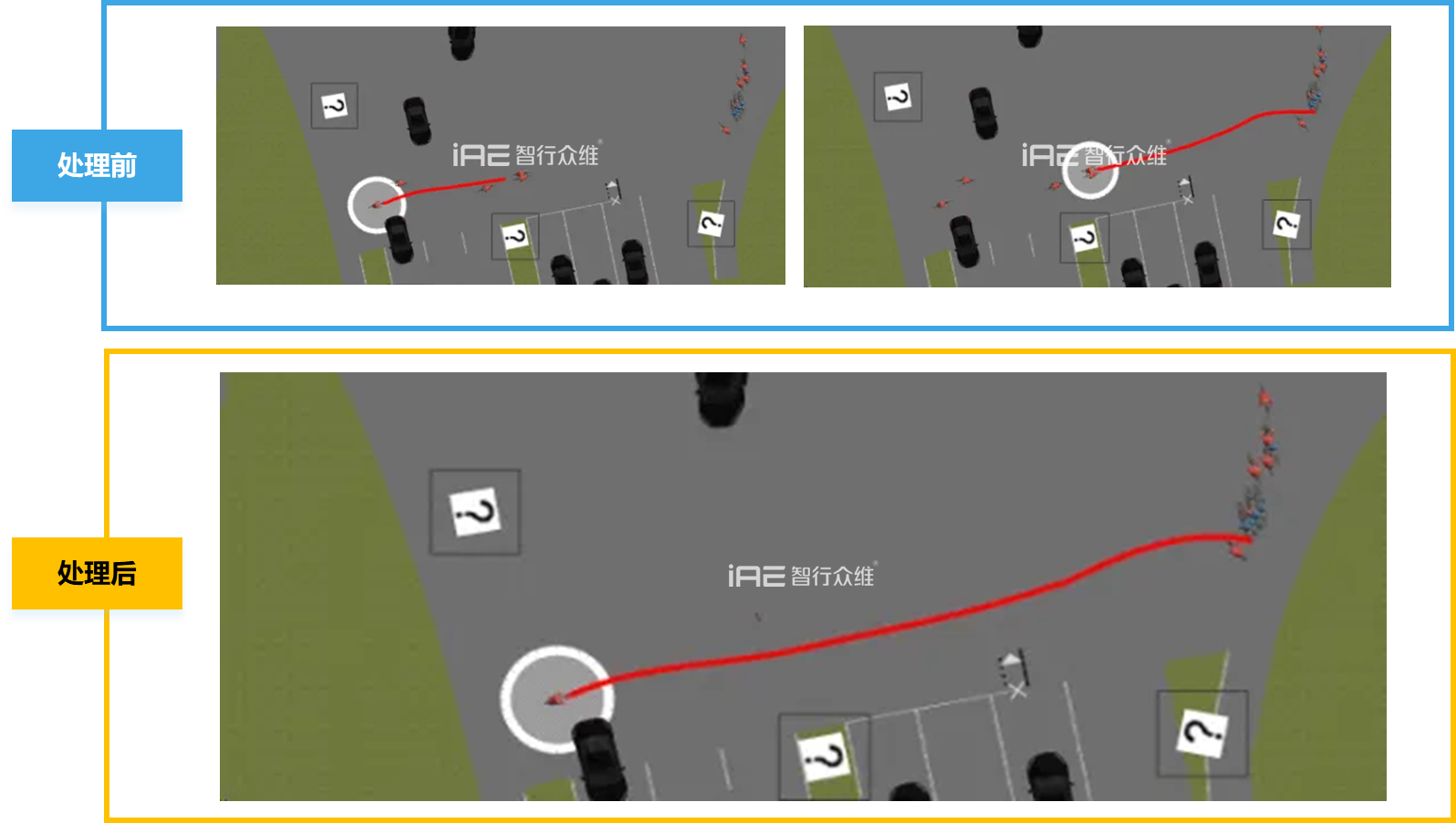
Crab功能:目标物自动合并效果
2. 价值提纯层
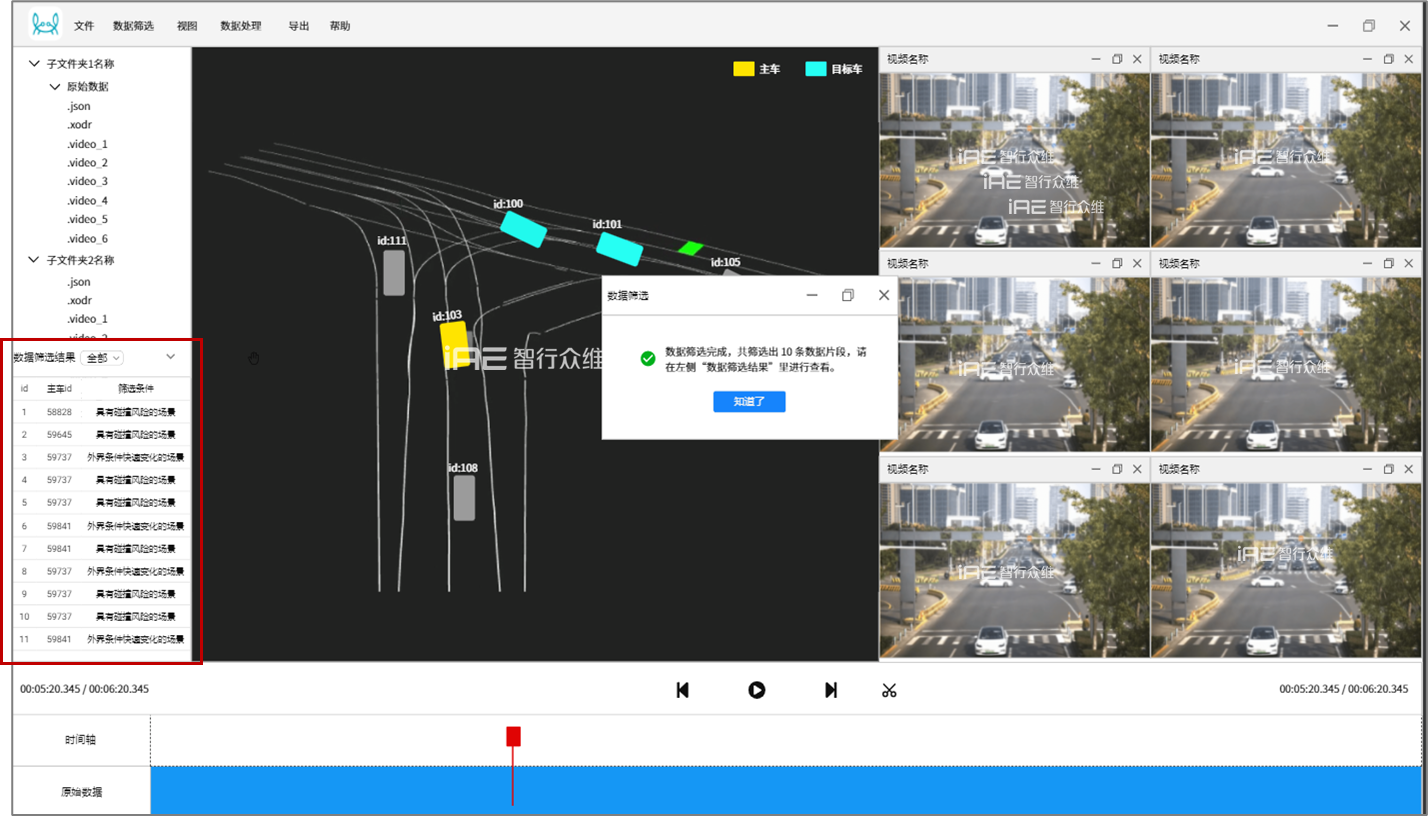
内置数据筛选规则,同时支持用户自定义筛选标准,构建智能场景特征蒸馏系统,实现关键场景识别。
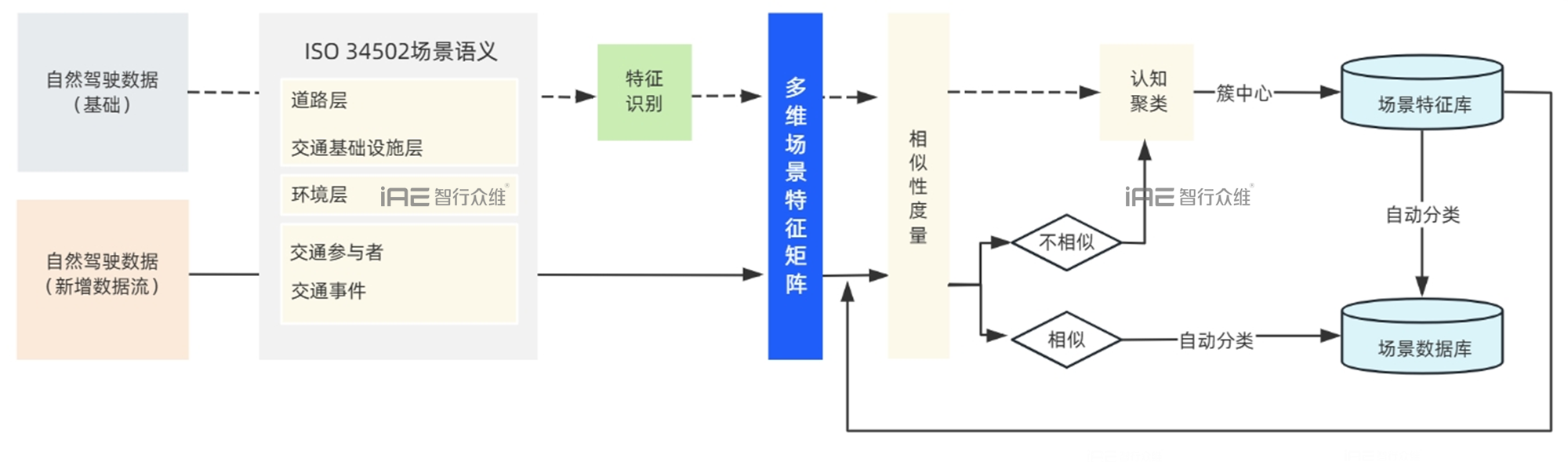
构建符合ISO 34502的场景语义本体库,实现多维场景特征矩阵,通过特征识别、认知聚类,并结合相似性度量技术,实现场景自动化分类和场景库自主进化。
核心三层能力基础上,Crab提供更多功能,支撑数据生产工程化应用:
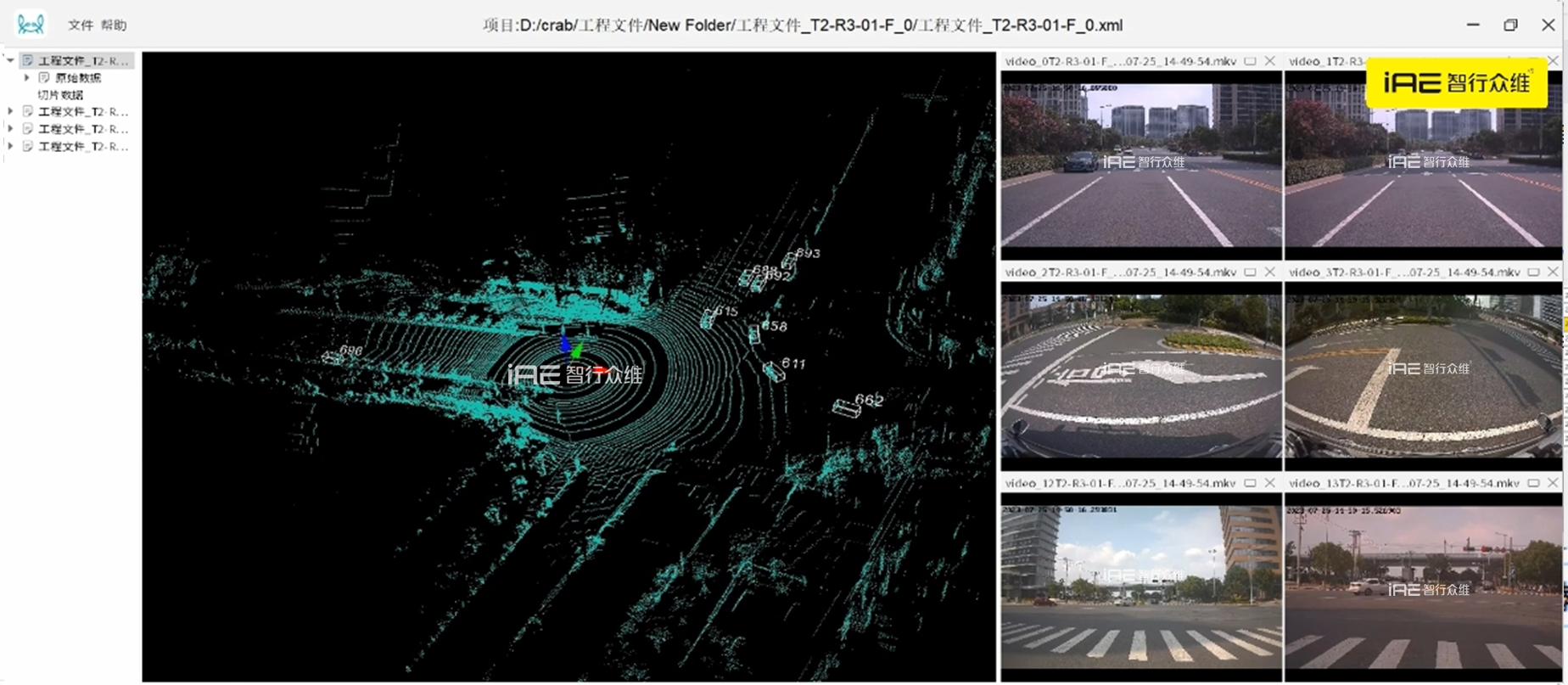
1. 多源数据可视化展示
Crab软件提供了丰富的可视化展示功能。支持展示点云、视频、OpenDRIVE格式路网、目标物等数据。方便用户更直观地了解数据情况和处理结果。
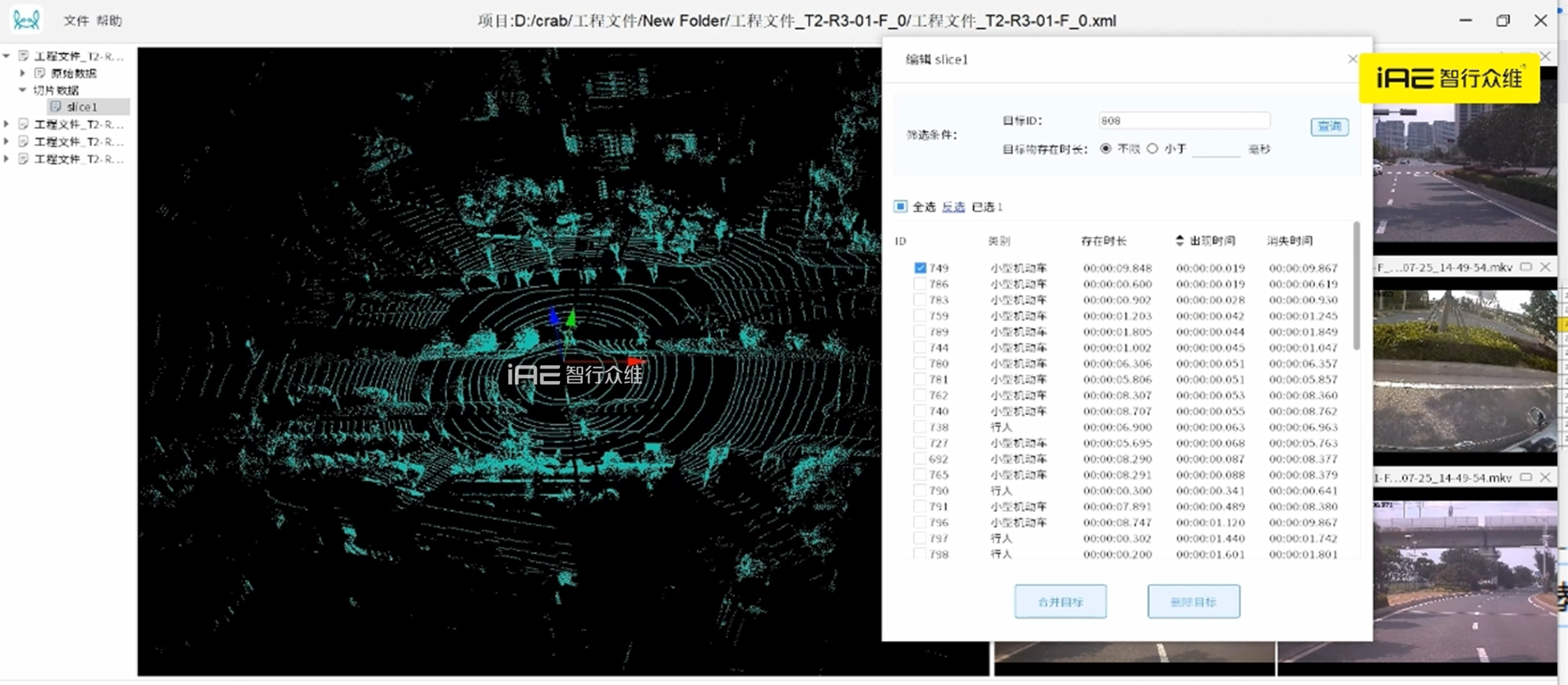
2. 手动编辑和切片
在自动化算法基础之上,Crab软件配套人工模式,支持进一步优化数据处理。同时支持多种数据片段切片方式,包括人工自定义切片(手动拖动进度条或输入起终时刻)、筛选结果切片;支持对数据切片复制、再切片、再筛选等处理。
3. 多样化数据导出功能
支持导出多种格式的数据处理成果,用于后续的数据应用链路。
– 面向SCANeR仿真平台的场景文件(.sce格式)
– 面向VTD和CARLA仿真平台的场景文件(openscenario格式)
– 面向数据分析的时序化表格文件(.csv格式)
