
【专家解读】智驾大变局!从功能演示到证据闭环,智能驾驶正式迈入”安全论证”时代
近期CICV 2026第十三届智能网联汽车技术年会上,中国工程院李骏院士提出重要警示:自动驾驶清单式合规的应试时代已经结束,Safety Case(安全论证)成为行业新核心门槛,叠加2027年即将落地的ISMR在役监控要求,行业淘汰赛全面开启。
针对这一行业重大变革,IAE智行众维资深首席安全专家方成熏(PANG SUNG HOON / Mr.Pang) 结合二十余年自动驾驶系统研发、功能安全与预期功能安全开发和评测的资深经验,深度解读行业发展趋势,并基于IAE X-IN-LOOP闭环技术体系指出:智能驾驶的竞争早已从“功能比拼”转向安全证据竞争,VaHIL与VTHILS 不只是研发测试关键装备,更是智能驾驶准入前、支撑”安全论证”(Safety Case)的必要基础设施。
一、行业巨变:智能驾驶,从“道路偶遇”全面转向“证据闭环”
过去智能驾驶行业的竞争,大多停留在功能演示、道路里程和用户体验层面。但如今整个行业进入了更冷静、更严格的新阶段:企业不能只证明“系统可以工作”,更必须严谨证明系统在边界条件和故障条件下仍然安全。
安全论证不是多写几页材料,也不是把测试报告简单装订成册。它要求企业把安全目标、危险场景、功能不足、故障反应、验证结果和残余风险用一条清晰的证据链连接起来。
随着国内准入试点、组合驾驶辅助强制性标准、预期功能安全、在用监测相关要求持续加码,所有主机厂、零部件供应商、测试机构都面临同一个核心问题:我的智能驾驶系统,凭什么被信任?
传统道路试验有其固有价值,但无法独立支撑高标准安全论证:暴雨、浓雾、低照度、异形目标、驾驶员接管、通信异常、电源波动、传感器偏移、执行器反馈异常等风险场景,不会按照研发计划准时出现;即便偶然复现,也无法保证下一次以完全相同的条件再次重现。
基于此,行业三大转变已经不可逆:
1. 从功能演示,转向证据闭环;
2. 从道路偶遇,转向可重复验证;
3. 从单一试验报告,转向标准化安全证据包。

二、事故复盘:从公开案例,看懂安全论证必须补齐的核心证据
结合多起公开事故案例分析可以看出,智能驾驶安全风险从来不是单点问题,而是感知、分类、预测、控制、告警、接管、数据记录多环节共同作用的结果。事故案例不是用来制造恐慌,而是用来反推哪些安全证据必须提前准备。

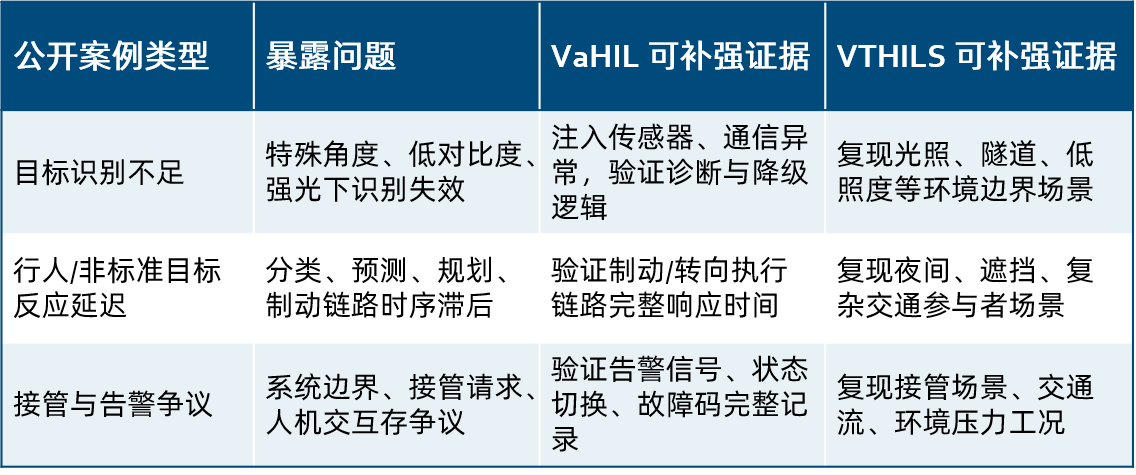
结合行业典型问题,目前主要存在三大高频风险点,同时也明确了对应的证据补齐要求:
01 交叉目标/白色目标误识别
感知系统在特殊角度、强光、低对比条件下易出现目标识别不足。
所需证据:目标检测边界、误检/漏检率、触发条件、系统降级策略,以及夜间、遮挡类场景的完整验证数据。
02 非标准目标分类、反应延迟
目标分类、轨迹预测与制动决策链路响应过慢,会直接放大碰撞风险。
所需证据:感知-规划-制动全链路时序数据、最小风险策略、全场景验证记录。
03 驾驶员接管与告警争议
L2/L3级智能驾驶的功能边界、接管请求、驾驶员监控、HMI警告,是事故责任判定的核心。
所需证据:接管请求时机、告警强度、驾驶员反应假设、完整的数据记录。
中国市场的关键不是“谁的功能更炫”,而是谁能把边界条件、接管逻辑、降级策略和数据记录讲清楚、证据化。
结合两类核心在环平台,不同问题可针对性补强证据:
三、VaHIL:面向故障安全,打造全链路证据生成平台
VaHIL 的核心不是“把车辆放到设备上跑一跑”,而是把真实车辆、真实控制链路、虚拟道路负载、故障注入和同步记录打通,形成从故障触发到安全状态的完整证据链。

- 高风险故障可安全复现:可精准触发传感器偏移、开路、短路、信号延迟、数据丢帧、电源波动、执行器反馈异常等各类高危故障,全程在实验室完成,规避道路测试风险。
- 故障反应可量化:精准记录故障触发时间、检测时间、报警时间、降级时间、安全状态转移时间,所有数据量化可查。
- 证据链可审计:总线记录、故障码、信号波形、车辆动态响应、试验报告统一归档,完全满足第三方审计、安全评审要求。
2. VaHIL标准交付物(直接支撑Safety Case)
- 故障注入矩阵:明确故障类型、注入位置、持续时间、系统期望响应;
- 时序判定报告:统计检测时长、反应时长、降级时长,判定是否符合安全准则;
- 安全状态证据:报警记录、功能降级、功能退出、最小风险策略、故障码与总线原始数据。
3. 四层故障注入设计
为覆盖从物理失效到功能不足的全风险链,我们将VaHIL故障注入分为四大层级,这也是安全论证中故障部分的核心依据:
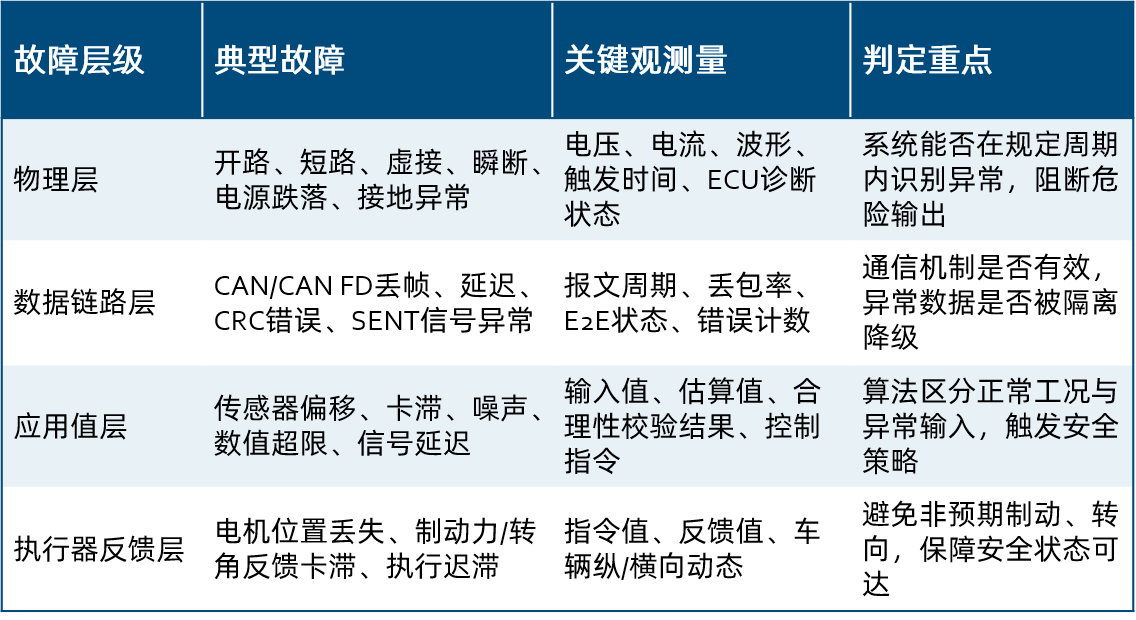
VaHIL 的判定不能只看“是否报警”,完整时序链路才是安全论证的核心。必须全程记录故障触发、诊断确认、告警、策略切换、执行器响应、车辆稳定、安全状态到达全流程时间戳。
四、VTHILS:面向场景安全,筑牢预期功能安全验证底座
VTHILS 的核心价值是将道路上难以等待、难以控制、难以复现的长尾场景,转化为实验室内可稳定运行的标准化场景。它特别适合验证ODD边界、恶劣天气、低照度、隧道、湿滑路面、混合交通和V2X条件下的系统鲁棒性。
如果说VaHIL 聚焦硬件与通信故障,那么VTHILS 则主攻复杂环境、长尾场景、预期功能安全(SOTIF),解决大量道路试验无法覆盖的边界工况。
1. VTHILS 核心实效能力
- 环境条件全可控:雨、雾、光照、湿滑路面、隧道等工况全部参数化设置,降雨强度、能见度、照度等指标精准可调。
- 同一场景可无限重复:同一车辆、同一算法版本、同一环境参数反复运行,方便版本对比、回归测试、问题追溯。
- 真实传感器参与:区别于纯仿真平台,沿用实车感知链路,测试结果无限贴近真实上路状态。
- 全面支撑预期功能安全:验证已知不安全场景,同时通过数据闭环持续挖掘全新风险触发条件。
2. 三层场景设计体系
为满足安全论证中场景可追溯、可复用要求,VTHILS场景分为功能场景、逻辑场景、具体场景三大层级:
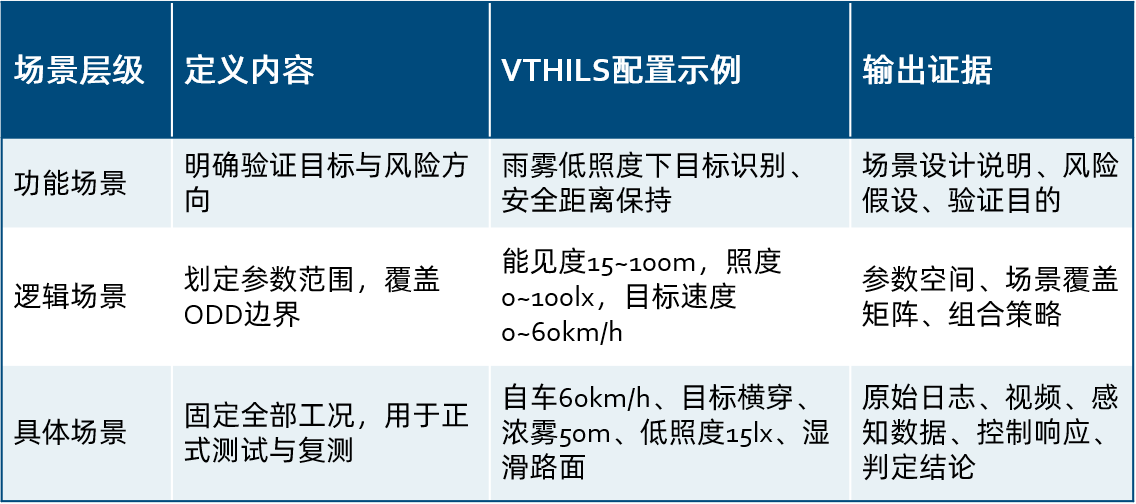
VTHILS需要完整记录传感器原始数据、感知融合、目标分类、轨迹预测、规划决策、控制指令、车辆动态、HMI人机交互全链路信息,这是支撑预期功能安全论证、接管逻辑论证的核心素材。
五、时序判定:安全论证的核心标尺,从“有无故障”到“是否及时安全”
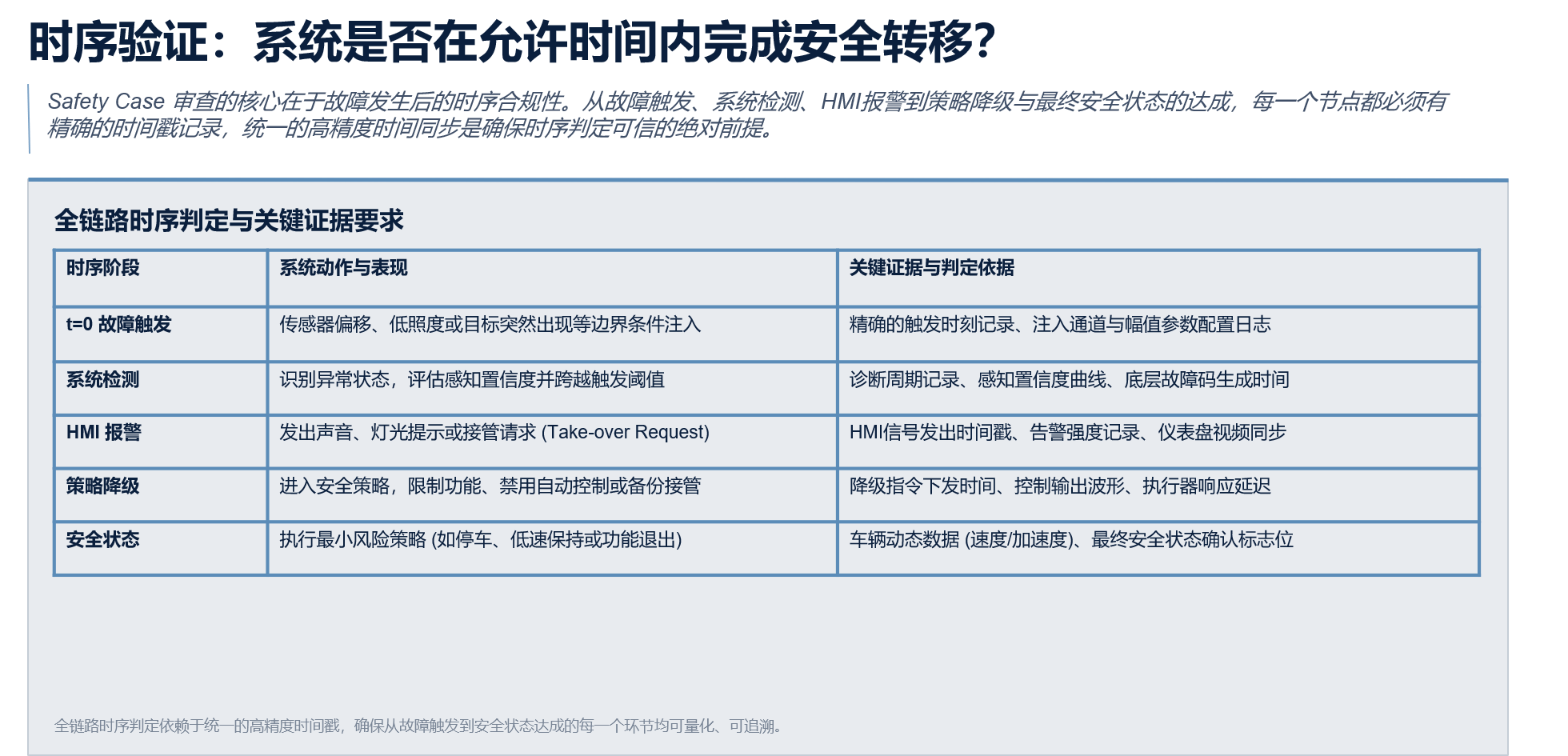
在安全论证中,单纯说明“系统检测到了故障”并不够。真正关键的问题是:系统是否在允许时间内检测?是否及时告警?是否完成降级?是否进入安全状态?这些问题必须通过统一时间戳的证据回答。
一套合格的时序证据,必须完整包含五大维度:
1.触发条件出现的精确时间;
2.系统检测到异常的时间;
3.报警、接管请求、功能退出的时间;
4.执行器响应与车辆动态变化数据;
5.系统进入安全状态/最小风险策略的时间。
时序数据是Safety Case中最具说服力的量化依据,也是国内外法规、第三方评审重点核查内容。
六、多类验证手段实效对比:VaHIL+VTHILS 补齐证据全缺口
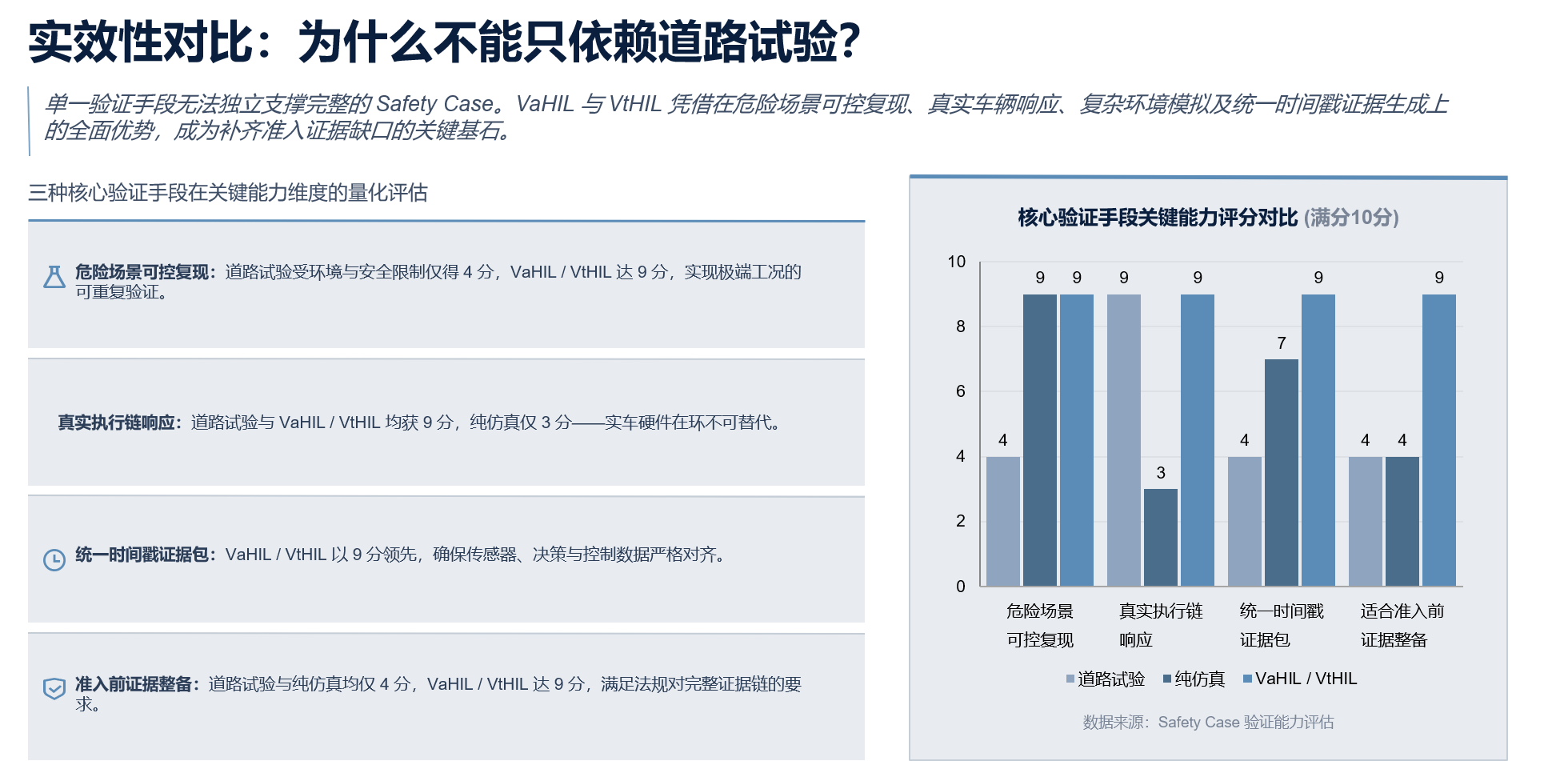
道路试验、纯仿真、传统台架、VaHIL、VTHILS 各有价值,行业发展方向不是用单一手段替代所有测试,而是建立组合式证据体系。
- VaHIL 聚焦高风险故障链、真实执行机构响应,补齐硬件失效、通信异常类证据;
- VTHILS 聚焦复杂环境、交通参与者、ODD边界复现,补齐长尾场景、预期功能安全类证据。
两者深度结合,才能完整补齐安全论证所需的全部证据链条。
七、核心交付物:客户最终采购的,是一整套安全证据包
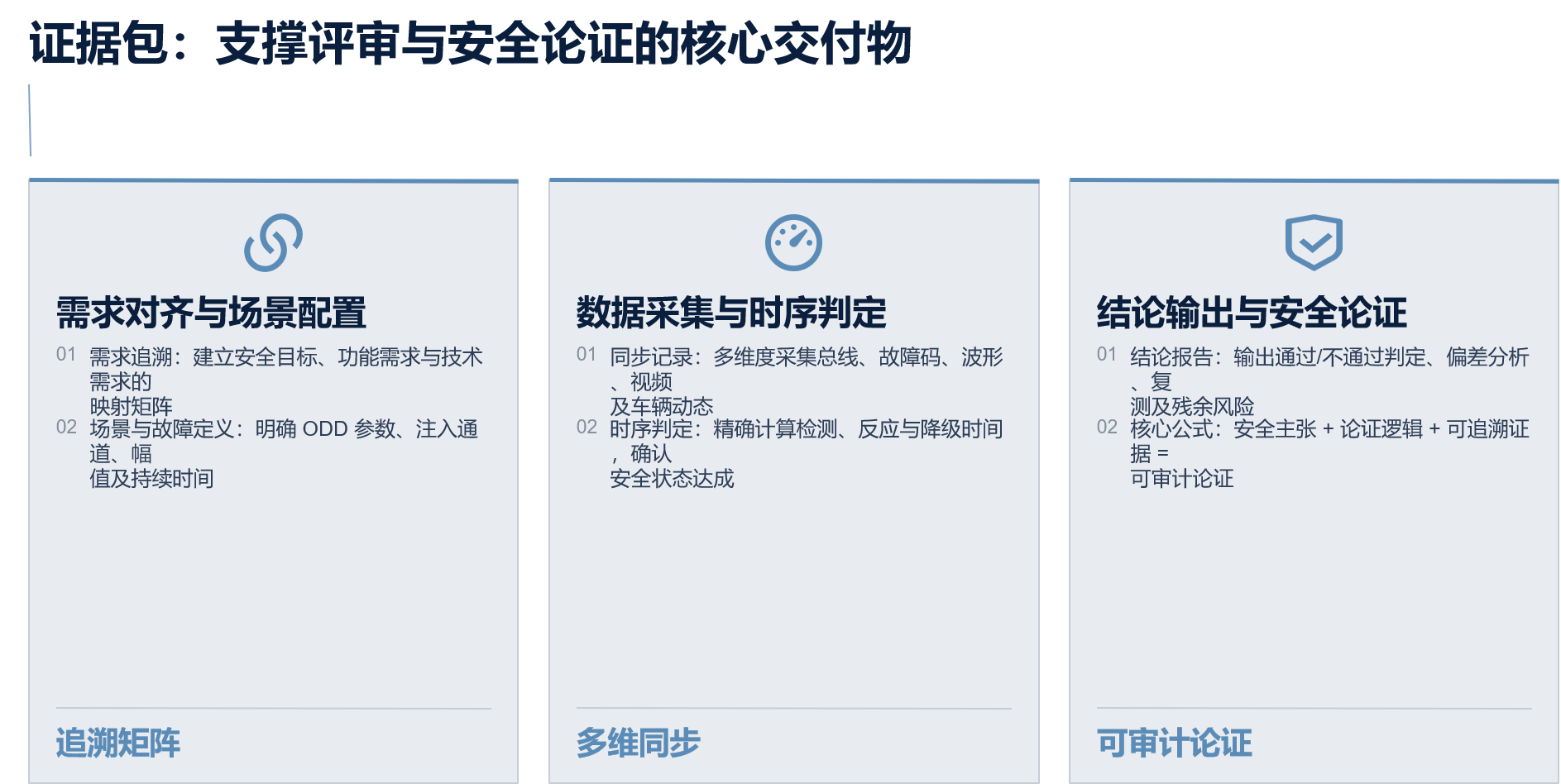
客户真正购买的不是一台设备,而是一套能够支撑安全论证的证据生成能力。每一个安全目标,都需要对应的场景、触发条件、判定准则、同步日志和报告结论。每一次故障注入,都应当留下检测时间、反应时间、故障码、总线记录、车辆响应和安全状态证据。
安全论证核心公式:安全主张+论证逻辑+可追溯证据= 可审计的安全论证
一套标准安全证据包,包含六大模块:需求追溯、场景定义、故障/触发配置、同步记录、时序判定、结论报告。所有内容围绕安全目标统一归档,可直接用于准入申报、内部评审、第三方检测等。
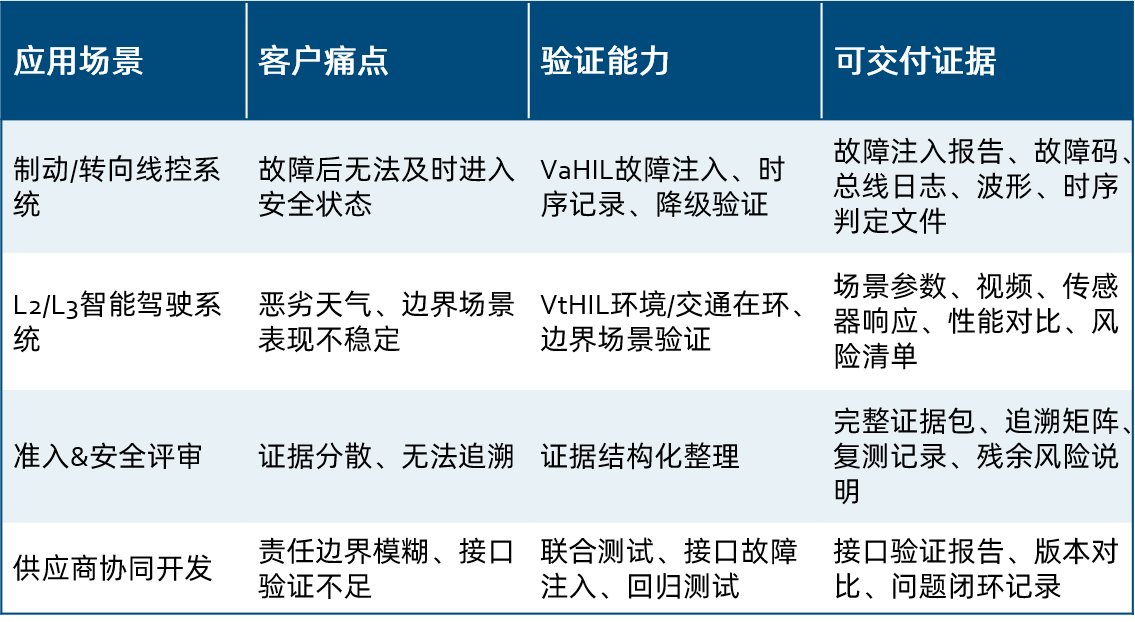
结合不同业务场景,IAE X-IN-LOOP 方案可输出对应标准化证据:
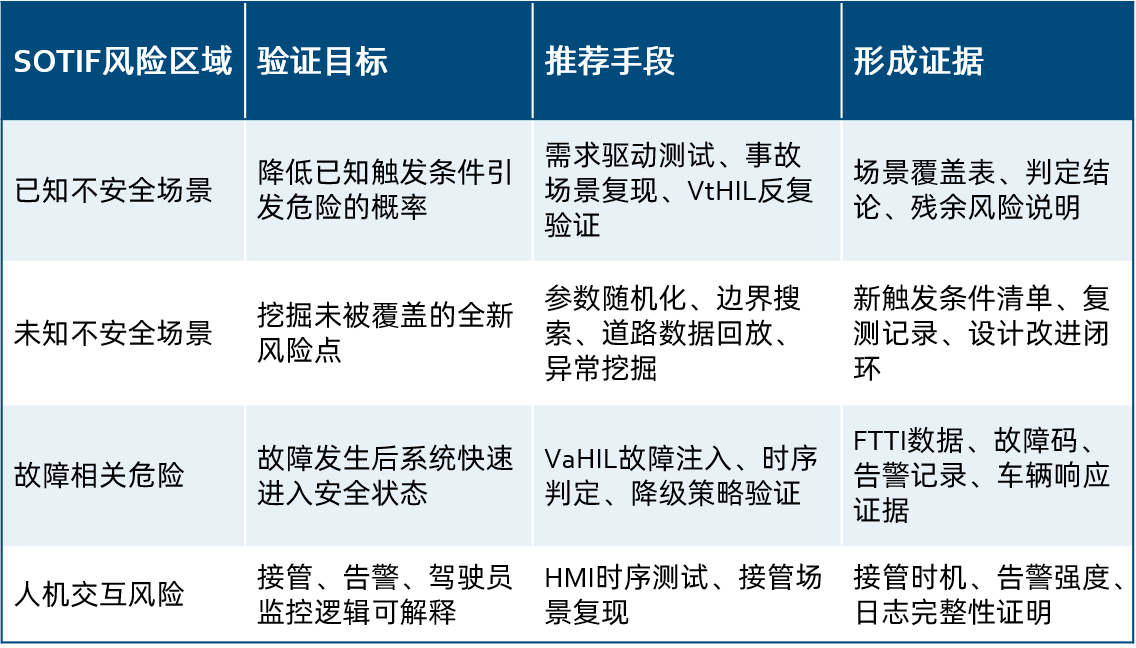
八、SOTIF闭环:覆盖已知与未知风险,实现全维度安全验证
面向预期功能安全(SOTIF),验证工作不能仅停留在已知场景。VaHIL与VTHILS组合,可搭建从已知不安全场景到未知不安全场景的完整闭环:
九、落地路线图:从设备采购,升级为安全证据能力建设
十、总结:VaHIL+VTHILS,智驾安全论证时代的核心基建
结合李骏院士提出的行业变革,以及国内法规持续收紧的大背景,不难看出行业发展的核心趋势:
智能驾驶行业已经彻底从功能竞争,转向安全证据竞争。谁能更早建立可复现、可审计、可追溯的验证能力,谁就能更快完成准入、从容应对安全评审。
VaHIL 解决“故障发生后,系统是否依然可控”,守住故障安全底线;VTHILS 解决“复杂环境与长尾场景下,系统是否依然可靠”,拓宽场景安全边界。
两大平台结合,把危险场景留在实验室,把验证数据转化为合规证据包,全方位支撑Safety Case安全论证、功能安全、预期功能安全三大核心要求。简单概括其价值:把危险场景留在实验室,把验证结果变成证据包,把证据包支撑安全论证。
合规表达提醒(行业宣传准则)
在对外传播中,我们坚持严谨表述:
-推荐:支撑安全论证证据、ODD内安全性验证、高风险场景可重复验证、降低准入评审风险。
-规避:绝对安全、全场景通吃、完全替代道路试验、保证认证通过。
安全是智能驾驶行业的终身课题。在Safety Case全面落地的新时代,IAE智行众维将持续依托X-IN-LOOP、VaHIL、VTHILS系列解决方案,携手全行业伙伴,以扎实的技术、完整的证据链,助力中国智能驾驶产业合规、稳健前行。
专家介绍

方成熏(PANG Sung Hoon),IAE智行众维 资深首席安全专家,拥有25年自动驾驶系统、16年ISO 26262功能安全、8年ISO 21448预期功能安全(SOTIF)开发和测评的资深经验,深度参与国际权威安全标准制定工作,是ISO 26262第二版工作组成员、SOTIF工作组、UL 4600工作组成员,对全球智能驾驶安全法规、标准体系具备深刻理解与落地实践能力。
方老师先后任职于通用汽车、日本TAKATA、雷诺日产、现代汽车、红旗等全球知名企业,曾任华为2012实验室 功能安全/预期功能安全副首席专家,主导及参与众多重量级量产与预研项目,包括红旗H9(ADS Level 2+)量产项目、中国SOTIF政府课题、华为L3级自动驾驶预研项目、华为SOTIF安全措施项目、华为基于场景的L4级自动驾驶验证项目等,覆盖自动驾驶域、底盘域、车身域、新能源电控等全领域产品。