车辆级硬件在环仿真测试,可重现道路试验中存在安全隐患的试验场景,并在不同虚拟或真实场景中测试智能驾驶功能。实际道路或试验场测试前,进行整车级测试,可对智能驾驶中的感知系统、控制策略、执行机构等关键环节进行综合验证与评估。

VaHIL – 自动驾驶控制策略仿真测试实验室
VaHIL能够有效模拟并复现在实际道路上极难测试的各种极限和危险场景,可以满足ADAS与自动驾驶控制、决策及执行系统的快速、高效测试和验证的需求,是自动驾驶产业化和落地的关键验证技术手段。该实验室主要由四驱轴耦合式测功机、SCANeR Studio仿真平台、环形投影系统和ADAS及自动驾驶子系统等四大系统组成。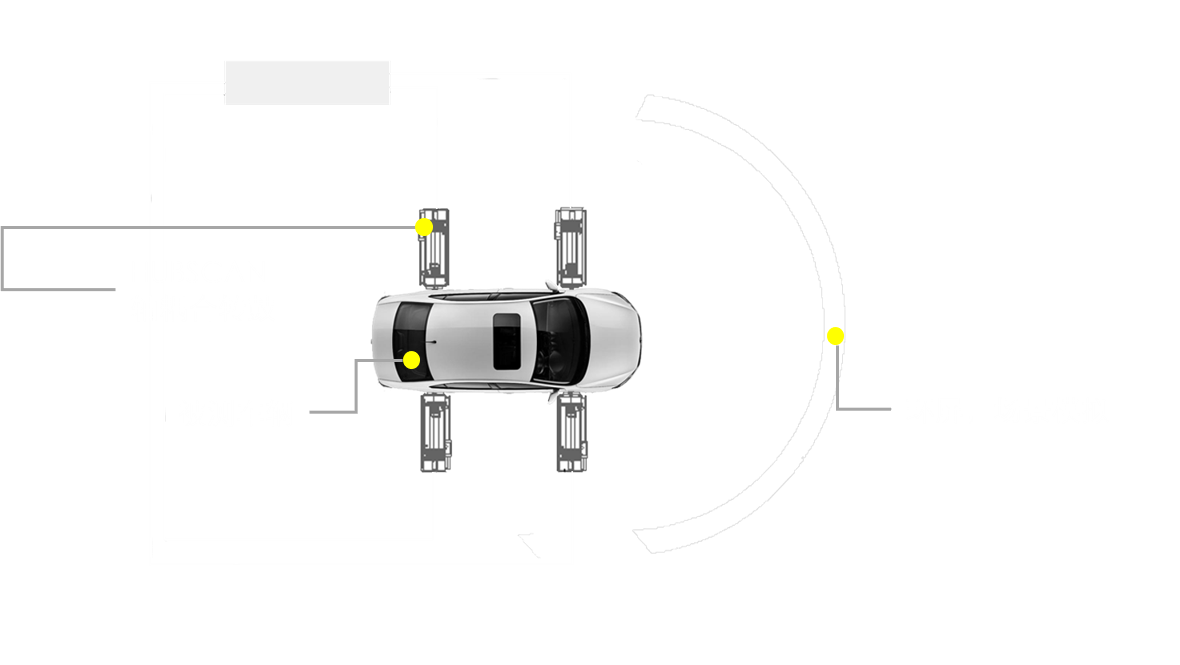
主要应用:
- 用于智能驾驶算法及控制决策系统开发测试
- 算法开发及优化
- 控制系统可靠性测试
- 安全冗余开发
- 真实转向模拟
- 制动模拟
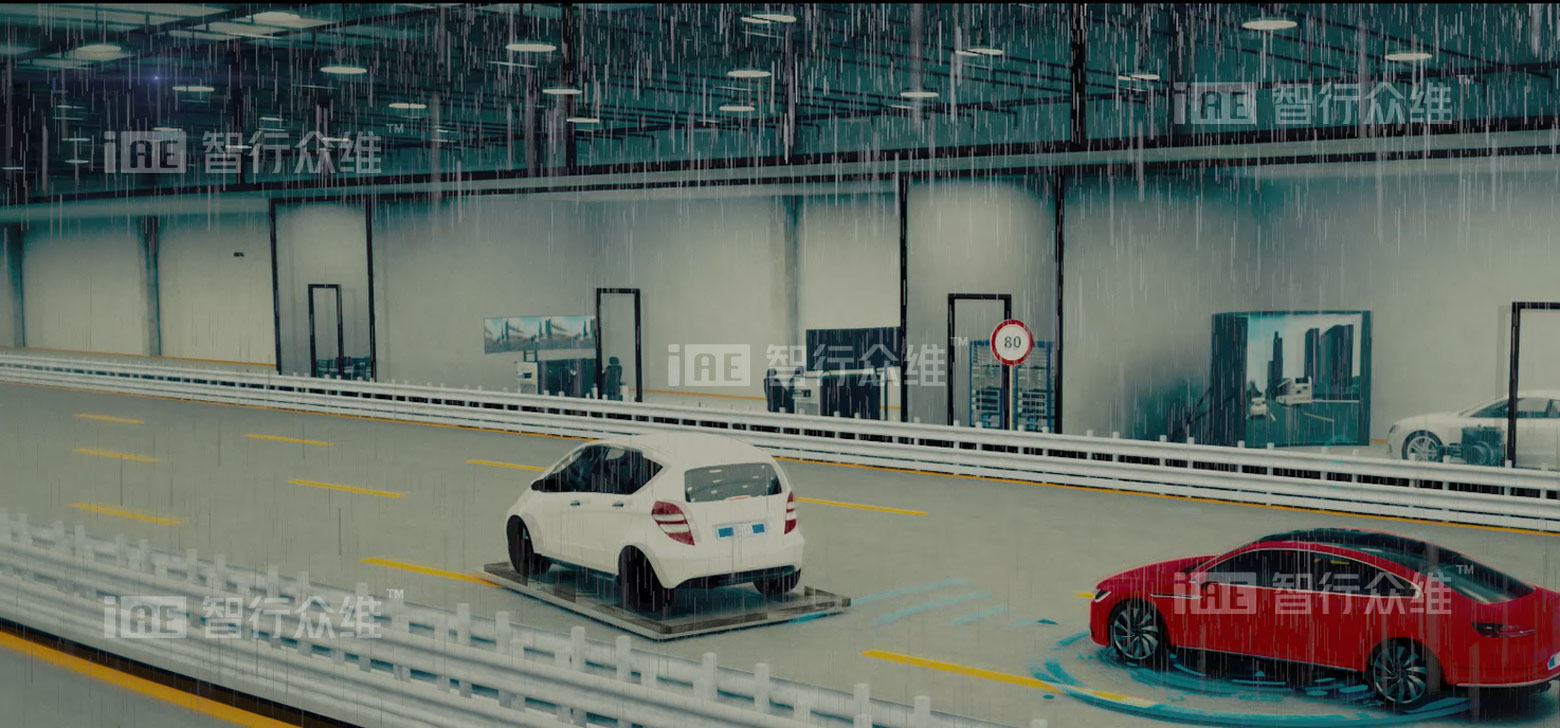
VTHILS – 车辆与交通场景在环测试实验室
VTHILS具有高效性、高可控性和高可重复性等特点,能够满足高危场景测试、容错性测试等复杂高风险测试的需求。由于是室内测试,因此支持传感器复杂模型建模、验证和标定,可以轻松控制并模拟每个环境参数(湿度、能见度、包括日照在内的环境光、温度等),从而确保测试的可重复性和一致性,帮助自动驾驶真正实现在恶劣天气条件下的安全使用。其可满足以下测试需求:
- ADAS试验
- 混合仿真试验场测试
- 交通试验
- 虚拟现实交通模拟试验
- 虚拟现实基础传感器试验
- 感知系统复杂天气环境模拟试验
- 虚拟现实基础HIL试验
- 虚拟现实基础车辆试验
- 实车行驶数据库连接车辆试验
- Robo-taxi及Robo-bus安全性验证试验
- 复杂交通场景的仿真场景库开发
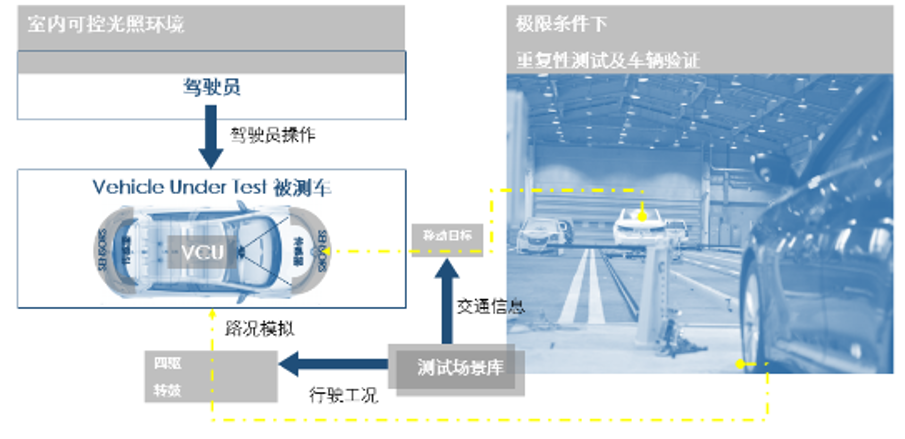
四大功能系统:
- 测试车辆道路模拟系统
- 交通场景模拟系统
- 环境模拟系统
- 虚拟仿真及集成控制系统