
Model-in-the-loop MIL simulation and software-in-the-loop SIL simulation are widely used in the early stages of intelligent & connected vehicle development. The sensor/vehicle/environment model is used to perform closed-loop simulation and verification of the control logic.
For functional verification of extreme cases , the results of open road and proving ground tests can also be brought back to the virtual environment for further analysis.
SCANeR Studio for Vehicle and Traffic Simulation Testing
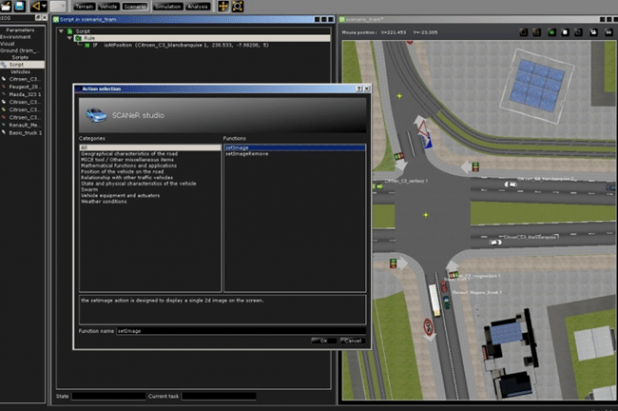
SCANeR studio developed by AV Simulation( former OKTAL) is a comprehensive software suite dedicated to automotive and transport simulation addressing both testing and driving for ADAS, Autonomous vehicle, HMI and headlight use cases. It provides all the tools and models that are necessary to build an ultra-realistic virtual world: road environment, vehicle dynamics, traffic, sensors, real or virtual drivers, headlights, weather conditions and scenario scripting.
Reappearing Road Network and Complex Traffic Flow
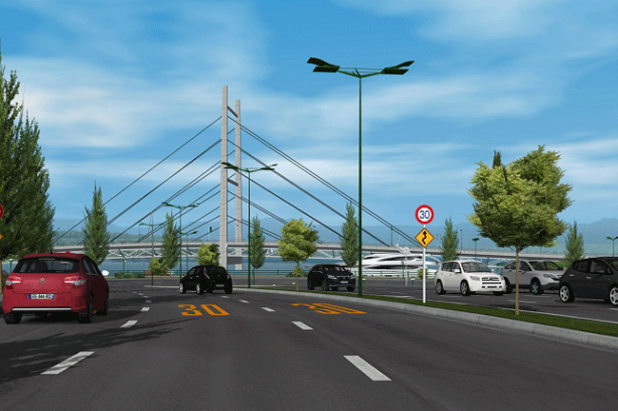
Simulating complex traffic scenarios such as intersections, buildings, traffic signals and so on. With configurable parameters like width / length / slope / direction of travel / unevenness / rain / friction, etc. And also supporting the import of terrain data from HD map.

Setting Up Changeable Traffic Scenarios
Simulating traffic scenarios by setting vehicle speed, handle operation, various inputs such as the winker, passage of the specified point and time lapse, pedestrian jump and urgent stop vehicle. It is also possible to define the behavioral characteristics of each vehicle.
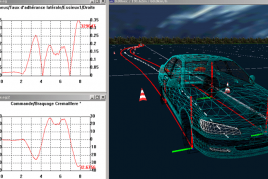
Data Analysis from Various-angle Views
It is possible to analyze data from various-angle views with synchronous vehicle speed, handle steering angle, braking, etc.
Applications

Road Network and Complex Traffic Flow Simulation
Dynamics Simulation for Vehicle/ Truck/ Bus
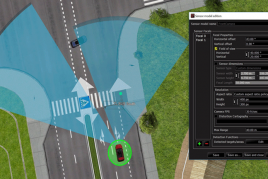
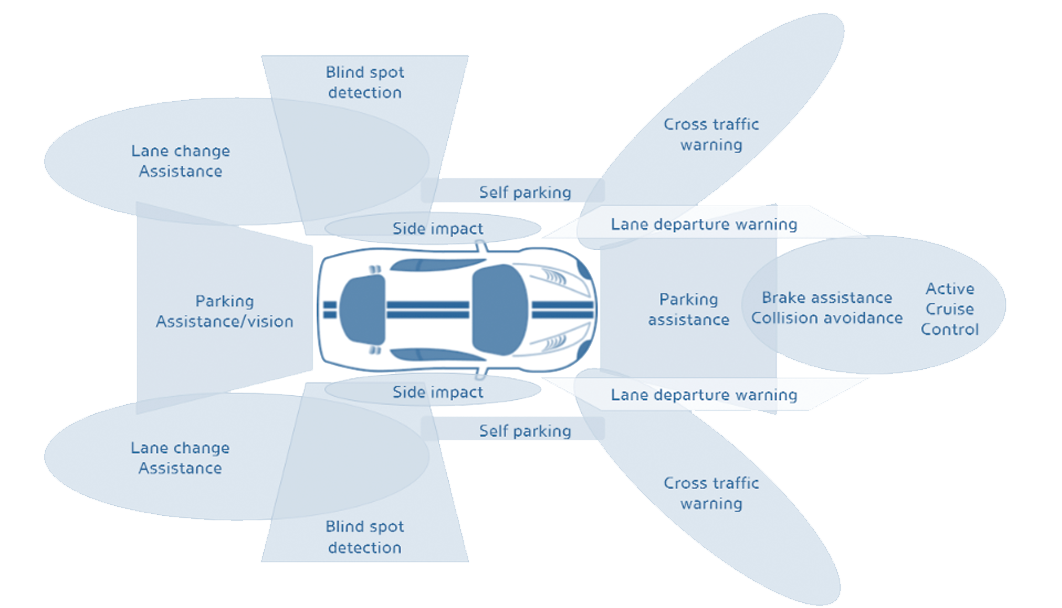
Multi Physical Sensor Simulation
