发布 | AVM虚拟测试解决方案
随着自动驾驶技术的发展,AVM(Around View Monitor,全景环视系统)正逐渐成为提升驾驶体验和安全性的关键技术。
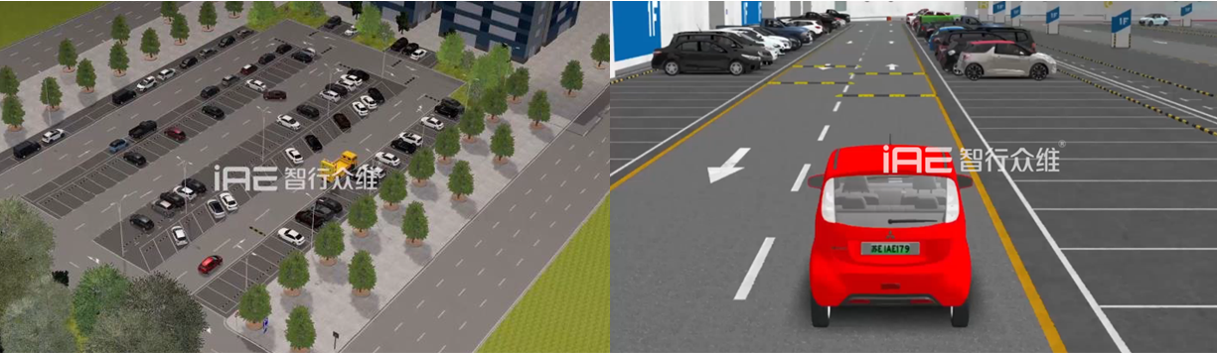
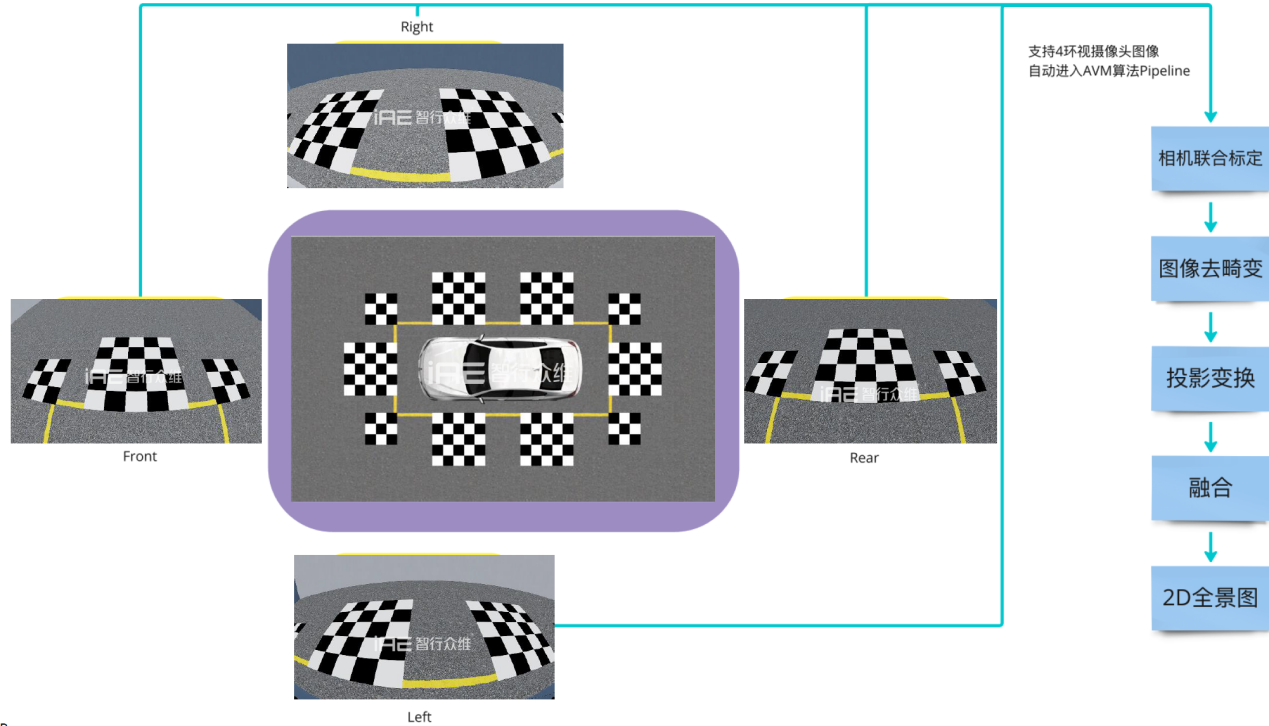
AVM技术通过安装在车身前后左右的4-8个超广角鱼眼摄像头,同时捕捉车辆周围的环境影像,利用先进的算法合成鸟瞰图。AVM能够直观地呈现出车辆周边的情况,为驾驶员提供一个全方位的视角。该技术的应用,极大地增强了驾驶员对车辆周围环境的感知能力,尤其是在停车、倒车或者在狭窄空间中行驶时,能够有效地避开盲区,减少事故的发生。
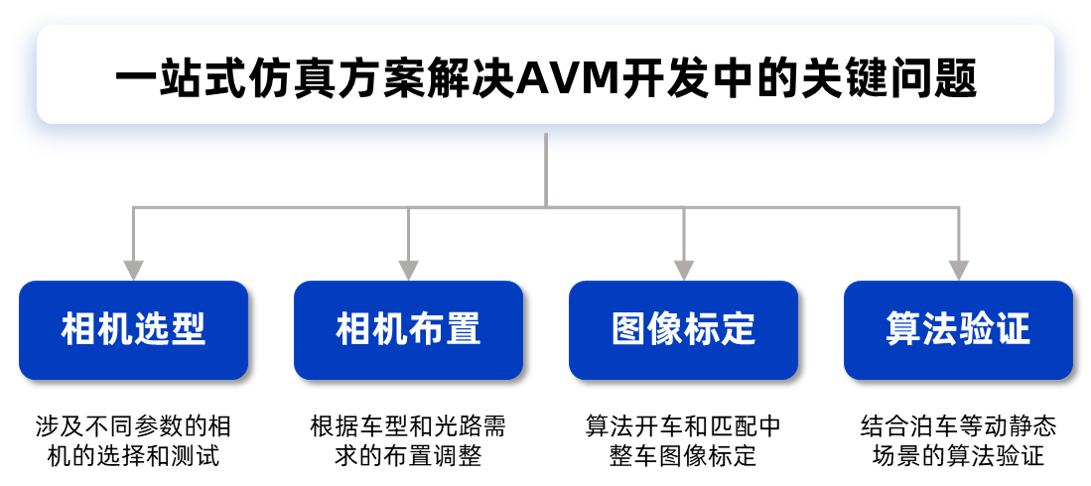
随着汽车智能化的不断提升,AVM系统正以其逐年攀升的渗透率,成为智能汽车不可或缺的核心组件。然而,随着AVM系统在汽车中的广泛应用,其开发与测试的复杂性也同步增加,对成本和效率提出了前所未有的挑战。企业在开发和测试AVM系统时,往往依赖于实体传感器和专业的标定试验环境。但为了优化成本效益、提高测试效率,同时确保测试场景的全面性,引入虚拟仿真技术显得尤为关键。
虚拟测试方案的优势
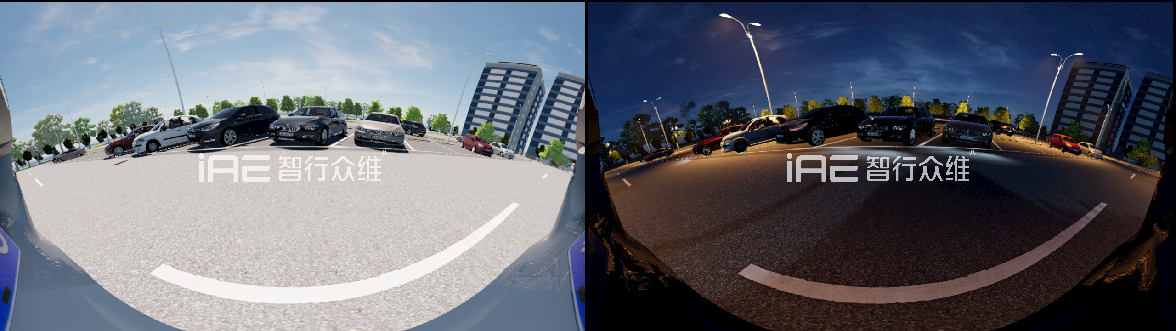
摄像头模型支持:使用SCANeR studio的Camera传感器模型,实现摄像头内、外参配置,及原始图像输出,同时结合Unreal渲染引擎,能够处理多种图像风格特征,从而输出更加逼真的图像支持算法的开发与测试。
支持摄像头畸变:AVM应用中,鱼眼摄像头的畸变仿真不可或缺。SCANeR studio支持导入畸变矩阵,能够在虚拟环境复现真实的畸变特征。
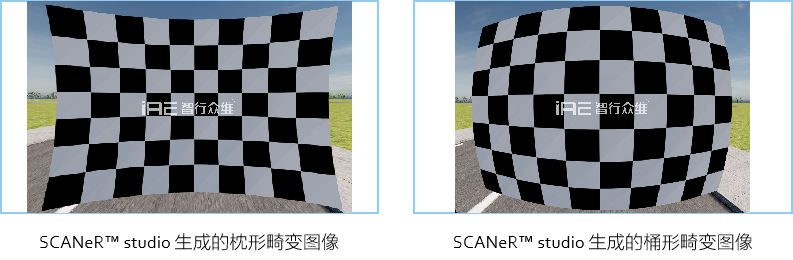
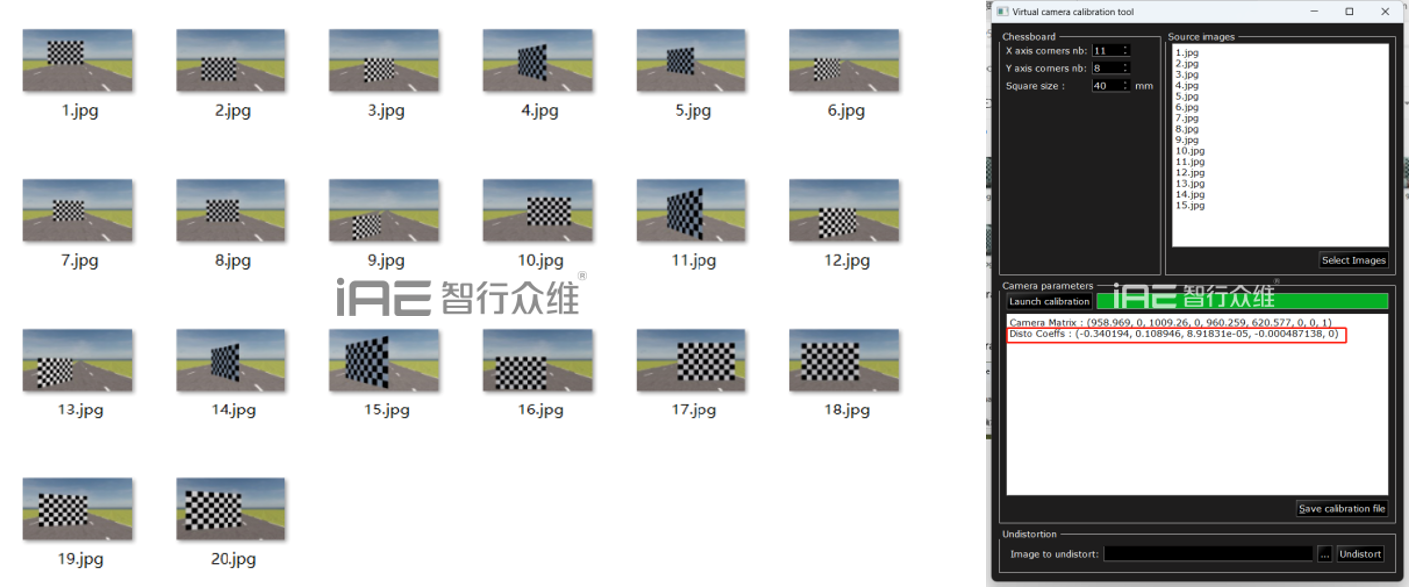
快速标定:SCANeR studio内置摄像头标定工具,采用棋盘格标定法生成内参矩阵和畸变系数,确保图像信息的准确性。
灵活扩展性:得益于仿真软件强大的场景构建能力,支持构建各类行车、泊车场景,实现复杂环境仿真(周边设施、天气、光照条件等),对AVM的延伸功能进行应用级别训练和测试。
AVM虚拟标定间的应用
AVM虚拟标定间提供了一个高度仿真的环境,实现了车辆、传感器、标定版的精准布局和调节。在这个环境中,可以模拟摄像头采集到的图像,并实现自动化与算法的连接,以适应不同算法的开发和测试需求。
SCANeR studio仿真软件,支持场景参数的衍生的同时也支持模型参数的快速更换。这种灵活性允许开发者在仿真环境中使用同一模型,更换不同的场景,验证算法的能力;或者使用同一场景,更换不同的模型,匹配最佳参数、最合适的模型。