随着GB 21670-2025《乘用车制动系统技术要求及试验方法》和GB 17675-2025《汽车转向系基本要求》的相继实施,线控底盘的安全验证不再只是“能跑起来”,而是要回答一个更尖锐的问题:当机械连接被弱化甚至取消后,故障发生时车辆是否仍然可控?证据链是否完整?
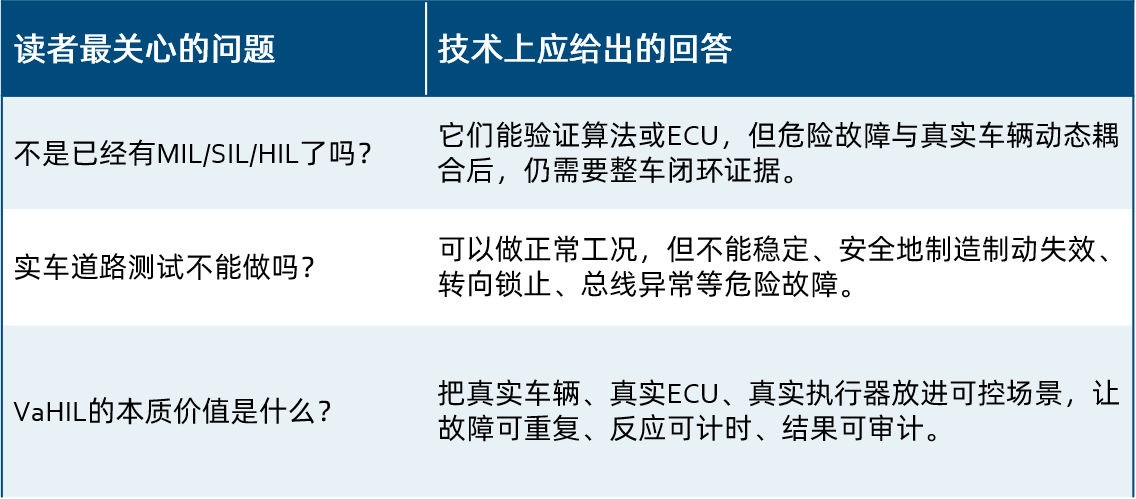
这篇文章不从设备规格切入,而从技术验证的视角说明:为什么VaHIL会成为线控制动、线控转向走向量产和合规评审时最有说服力的一环。

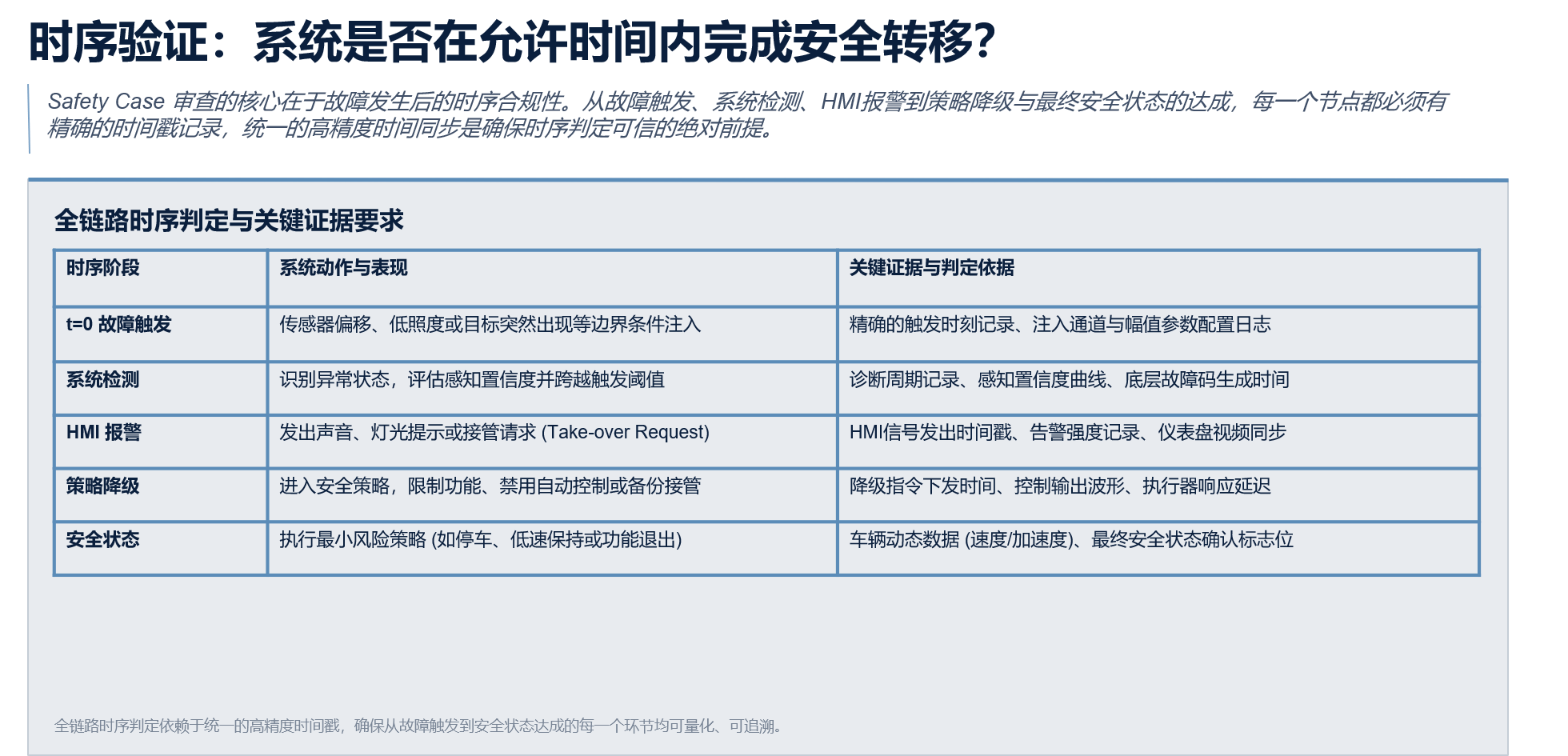
图1 “失效可控”的证据链:要求 → 注入 → 反应 → 判定 → 留证
1、线控底盘的安全挑战:没有机械备份之后,风险位置变了
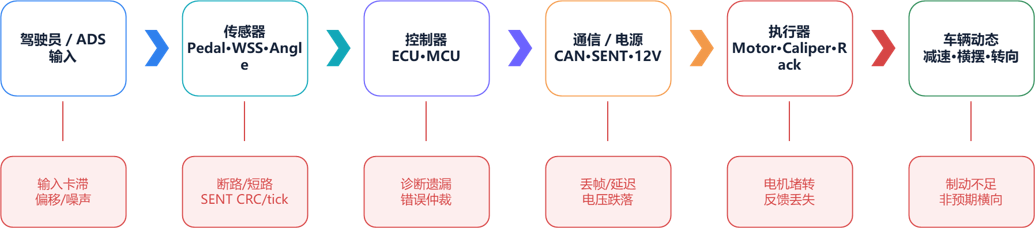
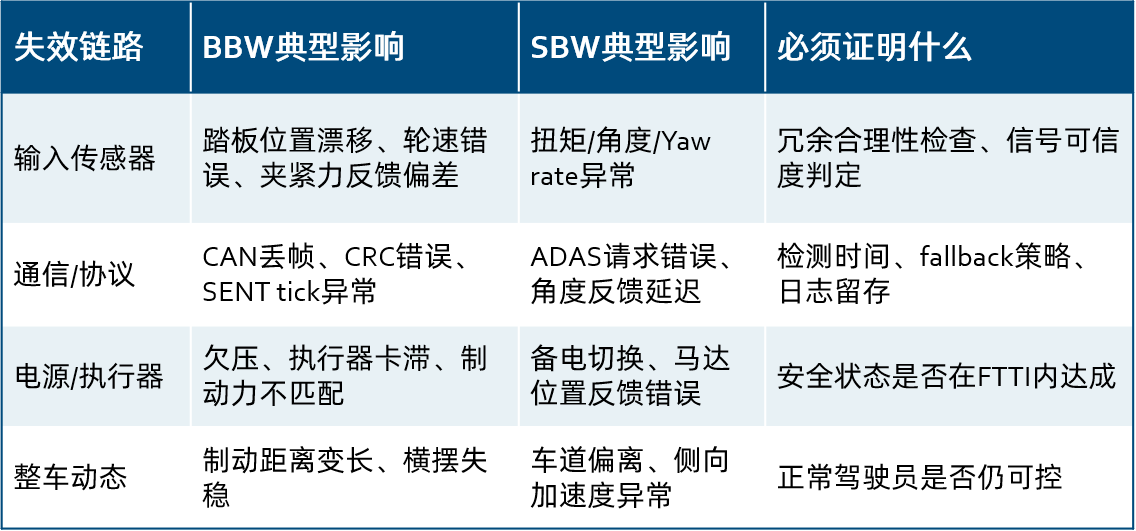
图2 BBW/SBW失效热点:风险不只在单个零件,而在整条信号—控制—执行链路
传统制动依赖液压管路,传统转向依赖机械转向柱。即使电子控制失效,仍可能存在一定物理冗余。但BBW和SBW不同:驾驶员意图通过传感器、电源、通信、控制器和执行器闭环实现。任何一环出现异常,都可能演变为制动力不足、非预期制动、非预期转向辅助、锁止转向或降级失控。
关键点:线控化后的安全验证,不是单独问“某个故障会不会被检测”,而是要问“检测之后车辆是否仍处于可控制状态”。这正是整车闭环测试的价值入口。
2、“失效可控”如何被证明:FTTI、降级状态和可控性要同时成立
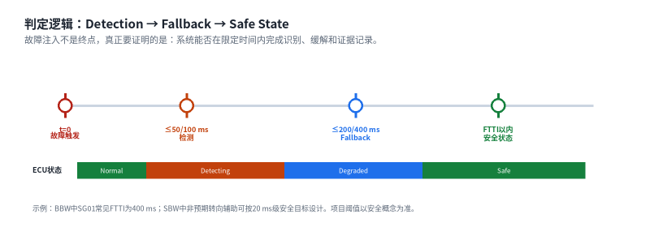
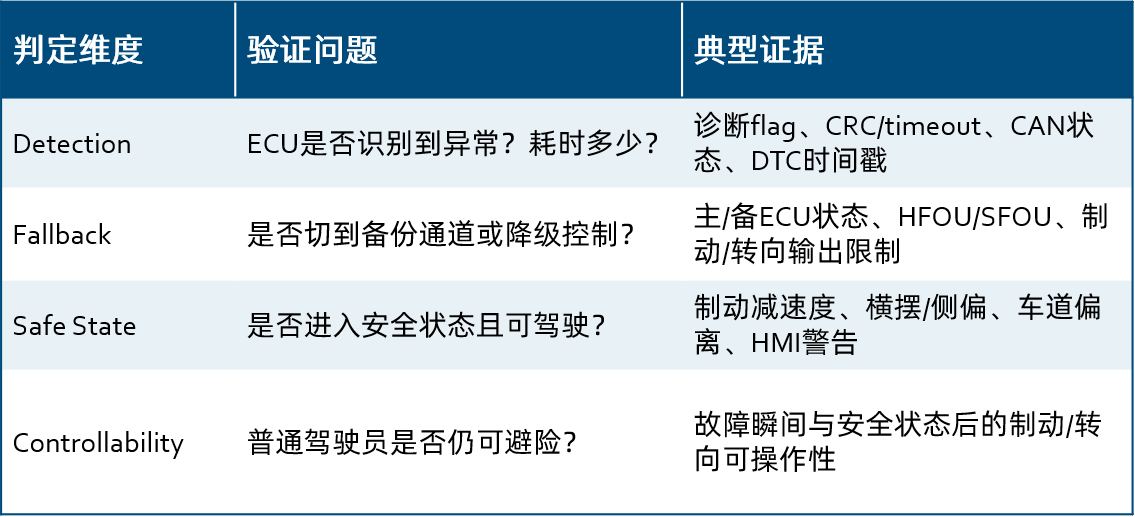
图3 从故障触发到安全状态的时间链:每个节点都应有时间戳和判定依据
在功能安全语境下,“可控”不是主观描述。它至少要同时满足三类证据:故障被诊断、系统进入约定的降级或安全状态、驾驶员/车辆仍具备足够的操作余量。附件中的BBW HARA给出过典型示例:基本制动SG01可按ASIL D、FTTI 400ms管理;ABS/ESC关联的横向安全目标可进入200ms级验证窗口。SBW侧,非预期转向辅助、锁止转向等安全目标可按20ms~200ms级时间窗进行设计验证。
所以,一份有说服力的验证报告不能只有“注入成功”。它必须把 fault trigger、ECU reaction、vehicle response 和 pass/fail criteria 放在同一条时间线上。
3、VaHIL是什么:真实车辆与虚拟世界之间的安全桥梁

图4 VaHIL闭环结构:真实车辆在虚拟交通/道路/环境中接受故障注入与动态验证
VaHIL(Vehicle Advanced Hardware-in-Loop)可以理解为“高级整车在环”:车辆是真车,ECU与执行器是真实硬件,道路、交通、天气、坡度、路面附着和传感器目标由仿真系统生成;车辆通过测功机或台架获得真实负载,故障注入单元在指定时刻触发电气、协议或信号级故障。
对客户来说,VaHIL最容易打动人的不是“平台很大”,而是:那些他们最怕做、最难做、最需要向认证/质量团队解释的场景,可以被系统化执行。
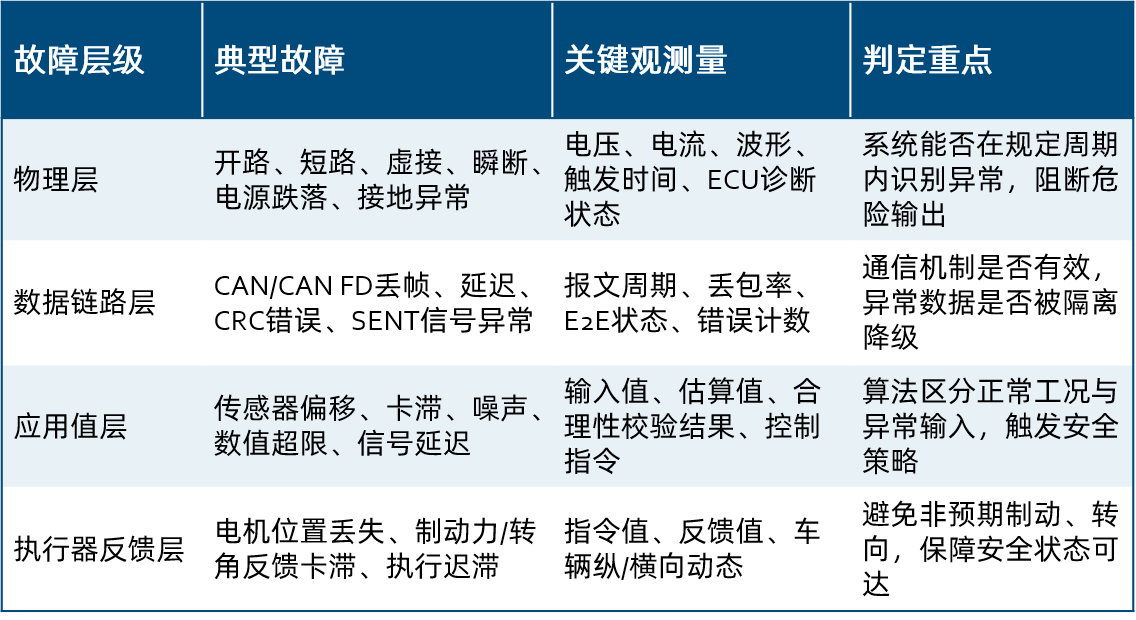
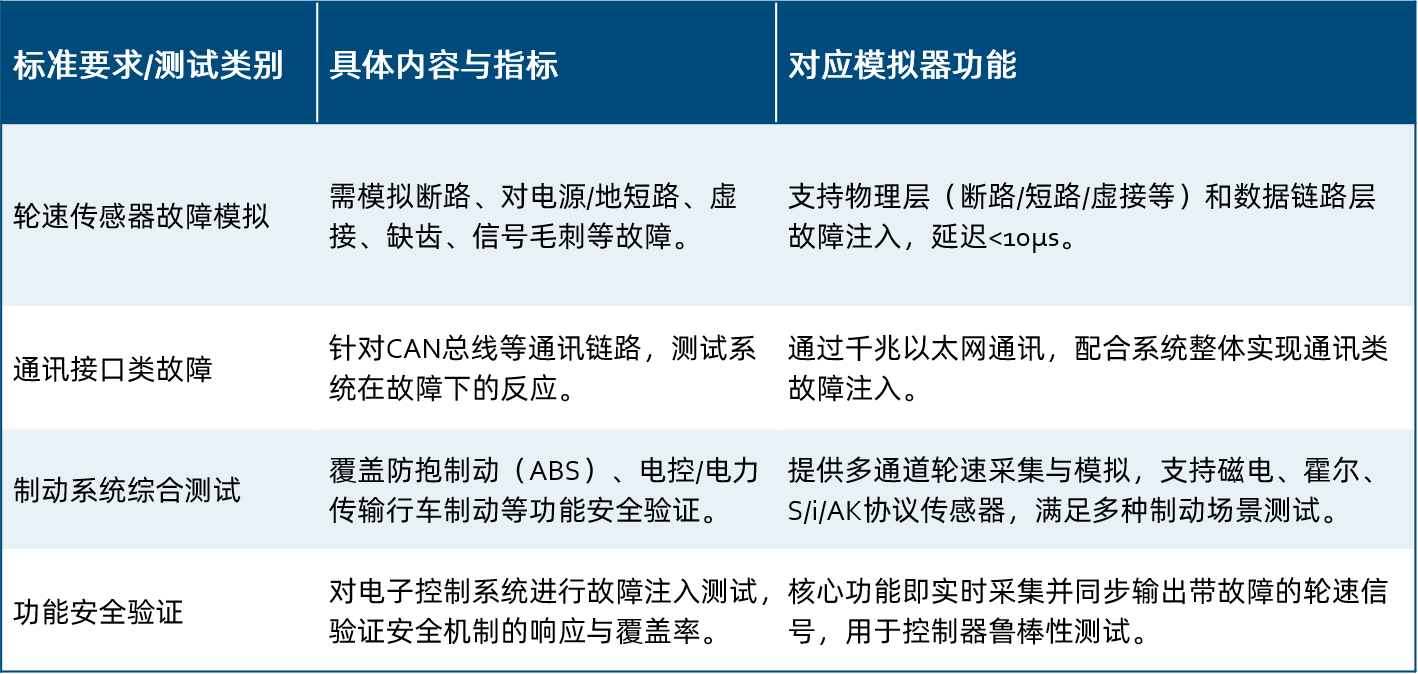
4、故障注入必须分层:从断线到协议位错误,再到应用值异常
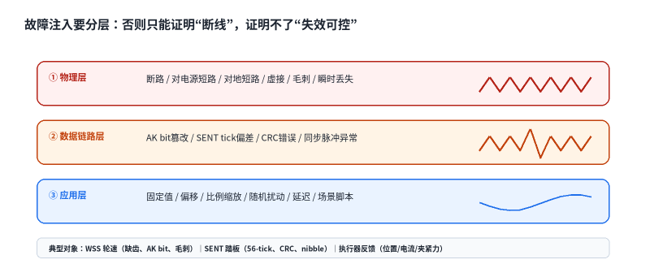
图5 三层故障注入:物理层、数据链路层、应用层必须组合覆盖
GB21670对应的制动电子控制系统验证,不能只停留在“短路/断路”。附件中的GB21670故障模拟器资料把故障注入分成物理层、数据链路层、应用层,并特别强调WSS和SENT等制动传感器的协议级失效。这个方向非常适合转化为客户能理解的Demo:同一套场景中展示正常波形、注入波形、ECU反应和最终判定。
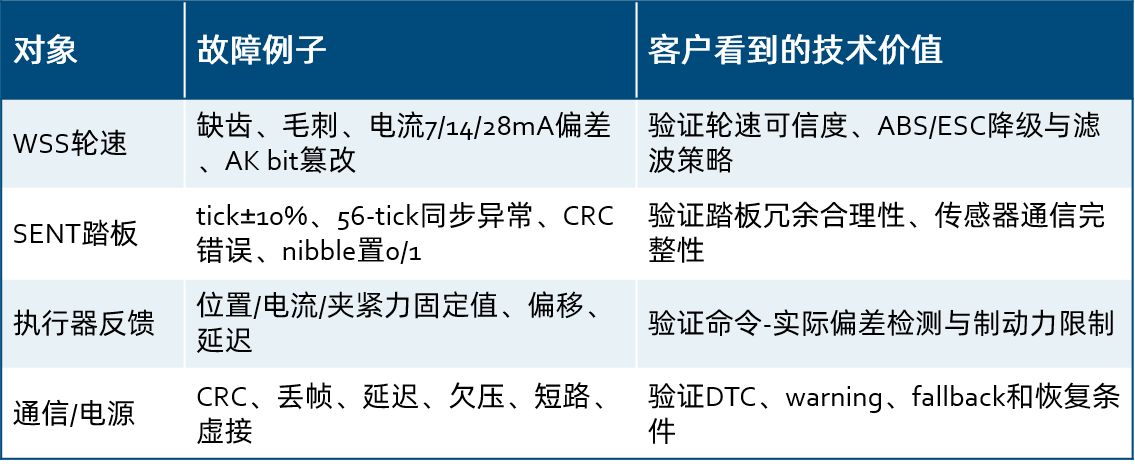
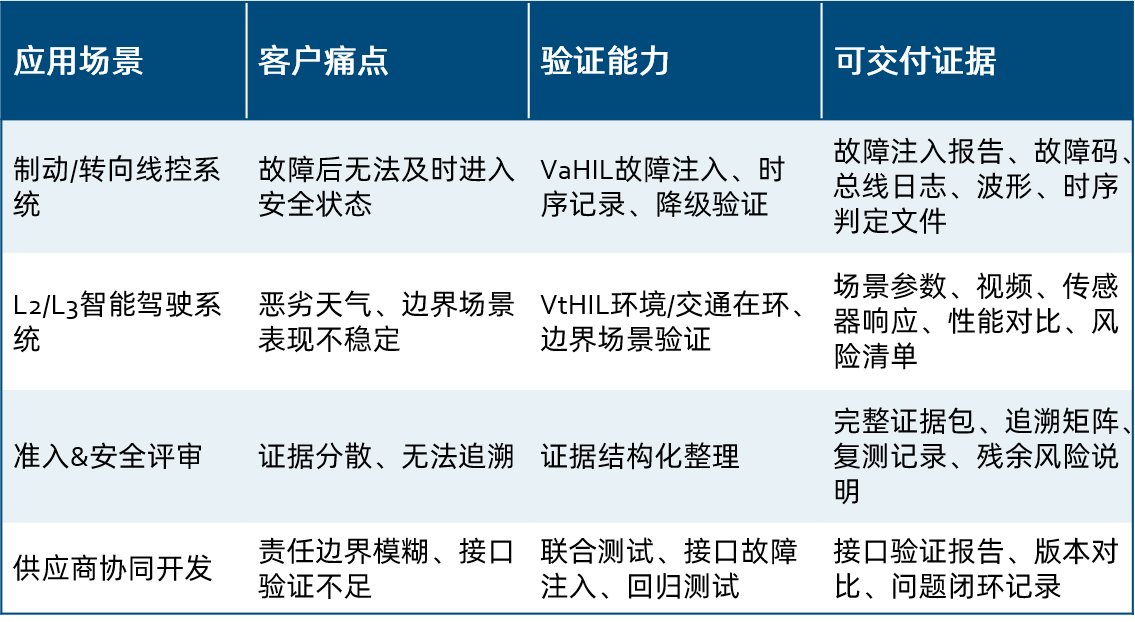
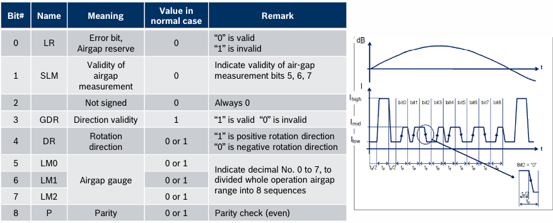
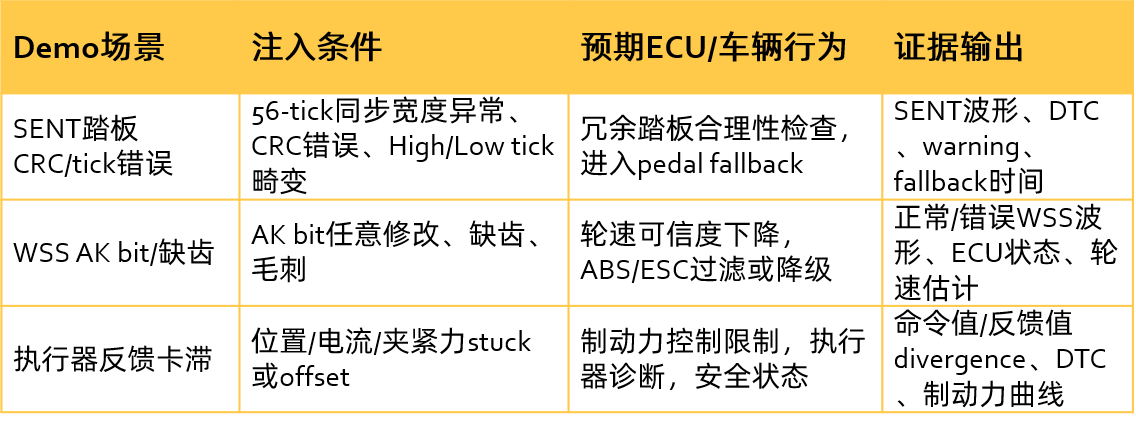
5、真实案例一:VaHIL如何验证BBW传感器故障下的制动安全

图6 BBW故障测试示意:SENT/WSS/执行器反馈故障与ECU反应同步记录
以BBW为例,客户最关心的不是“能不能造故障”,而是造出故障后,制动意图、轮速可信度、执行器反馈和制动力输出之间是否还能保持安全关系。VaHIL让工程师可以在同一场景中重复注入SENT CRC错误、WSS AK bit错误或执行器反馈卡滞,并观察主/备控制、DTC、warning、制动扭矩和车辆减速度的时序关系。
这类场景用实车道路做,最大的痛点不是“是否可能”,而是风险、重复性、注入时机和波形一致性。VaHIL让测试从经验判断变成可审计数据。
6、真实案例二:SBW在驾驶员/L3模式下的故障接管
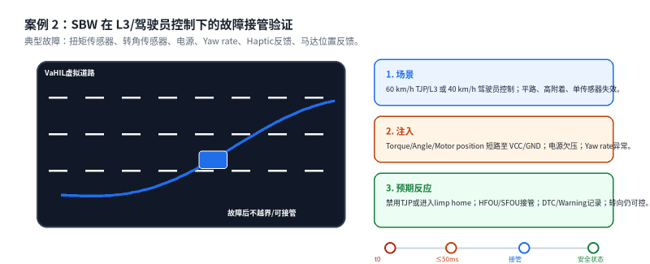
图7 SBW VaHIL场景:车道保持/变道中注入扭矩、角度、电源或马达位置故障
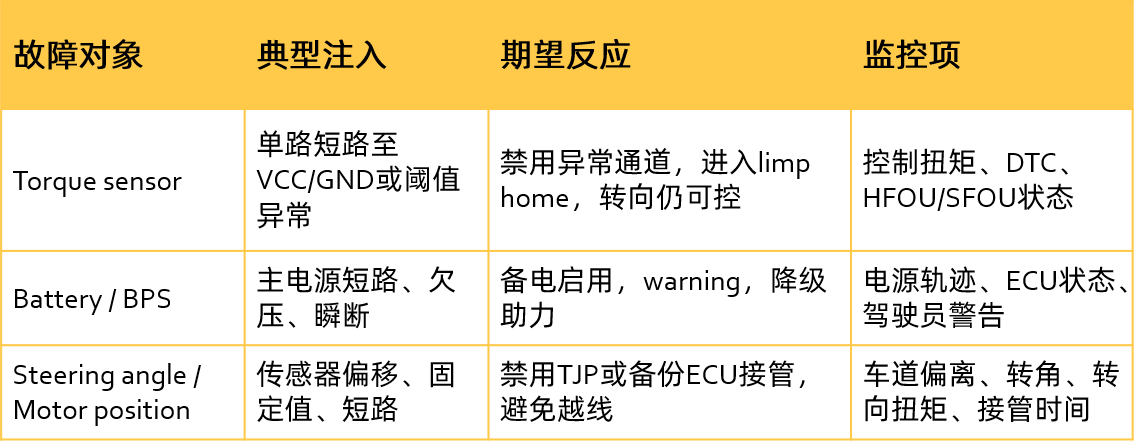
SBW取消机械连接后,最敏感的验证对象是“非预期转向辅助、锁止转向、突然失去助力、错误自动驾驶横向控制”。 SBW测试用例中,扭矩传感器、电源、Yaw rate、Haptic、转角传感器、马达位置传感器均被列为VaHIL测试对象,并要求在故障发生后禁用TJP或进入limp home,由HFOU/SFOU等备份路径接管。
VaHIL不仅验证ECU能检测故障,还能验证“故障检测期间车辆有没有越线、驾驶员是否仍可接管、备份通道是否按预期生效”。
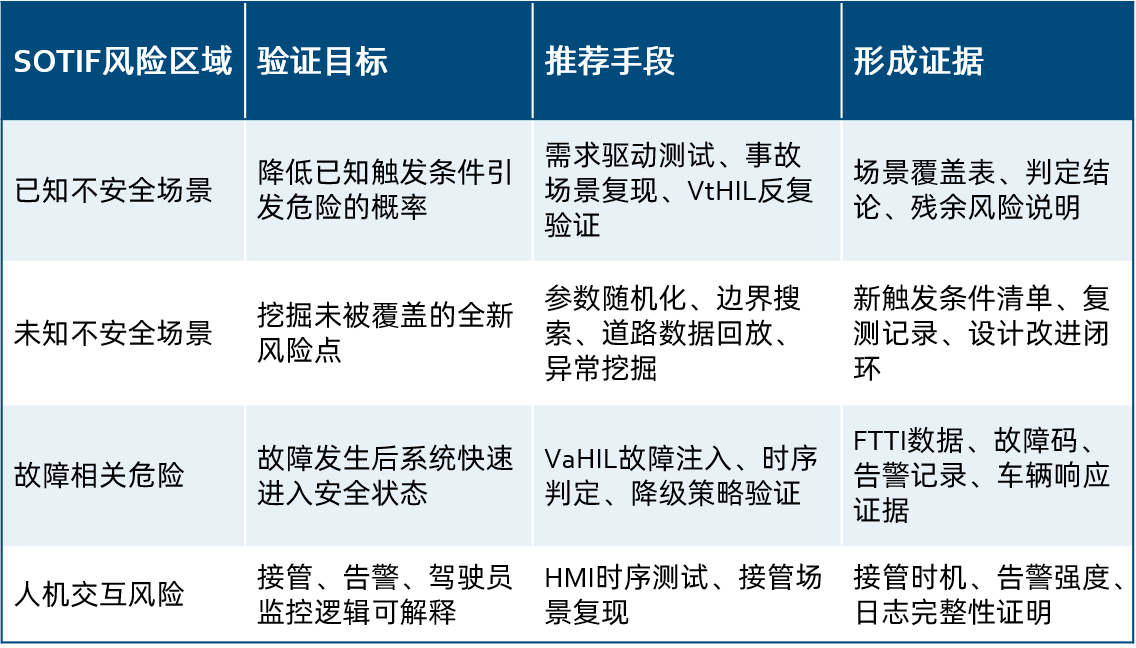
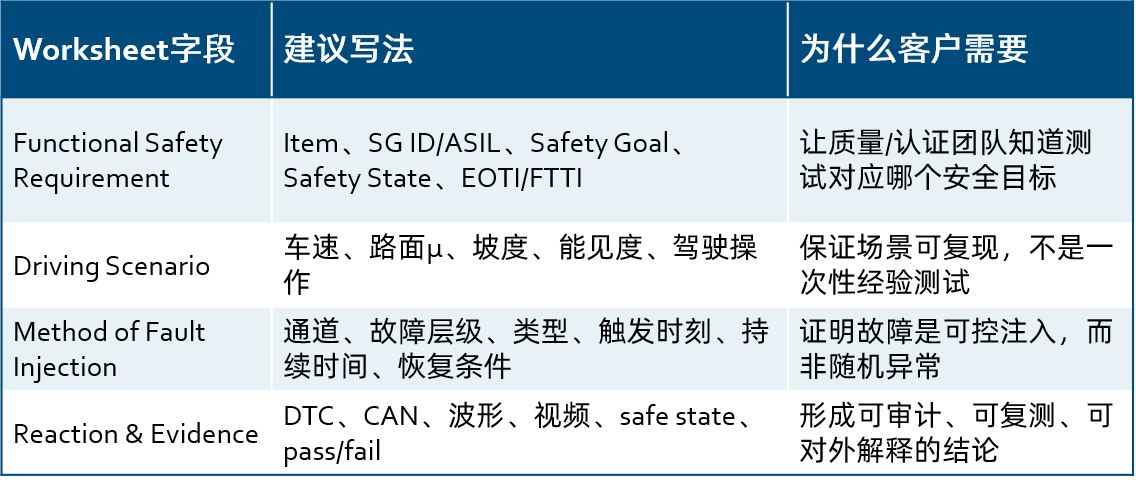
7、证据包设计:把Worksheet、日志、DTC、波形和判定放在一起
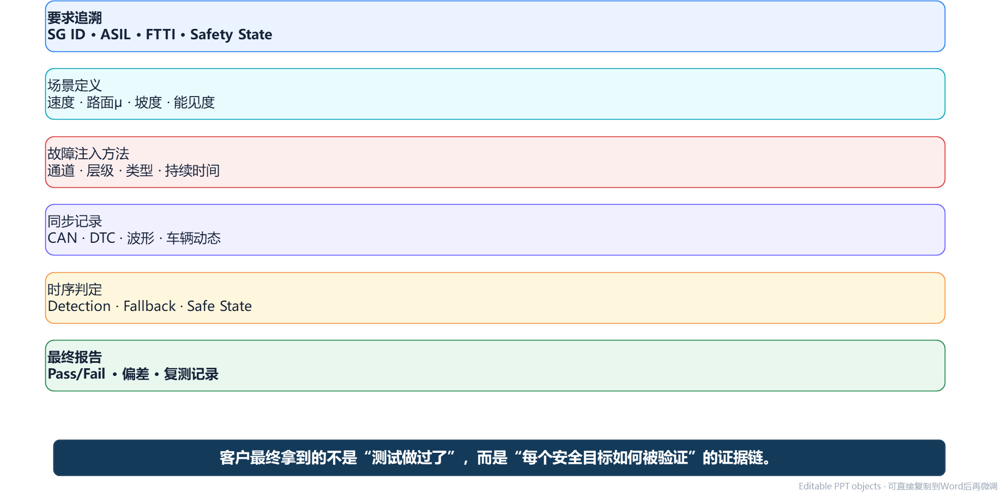
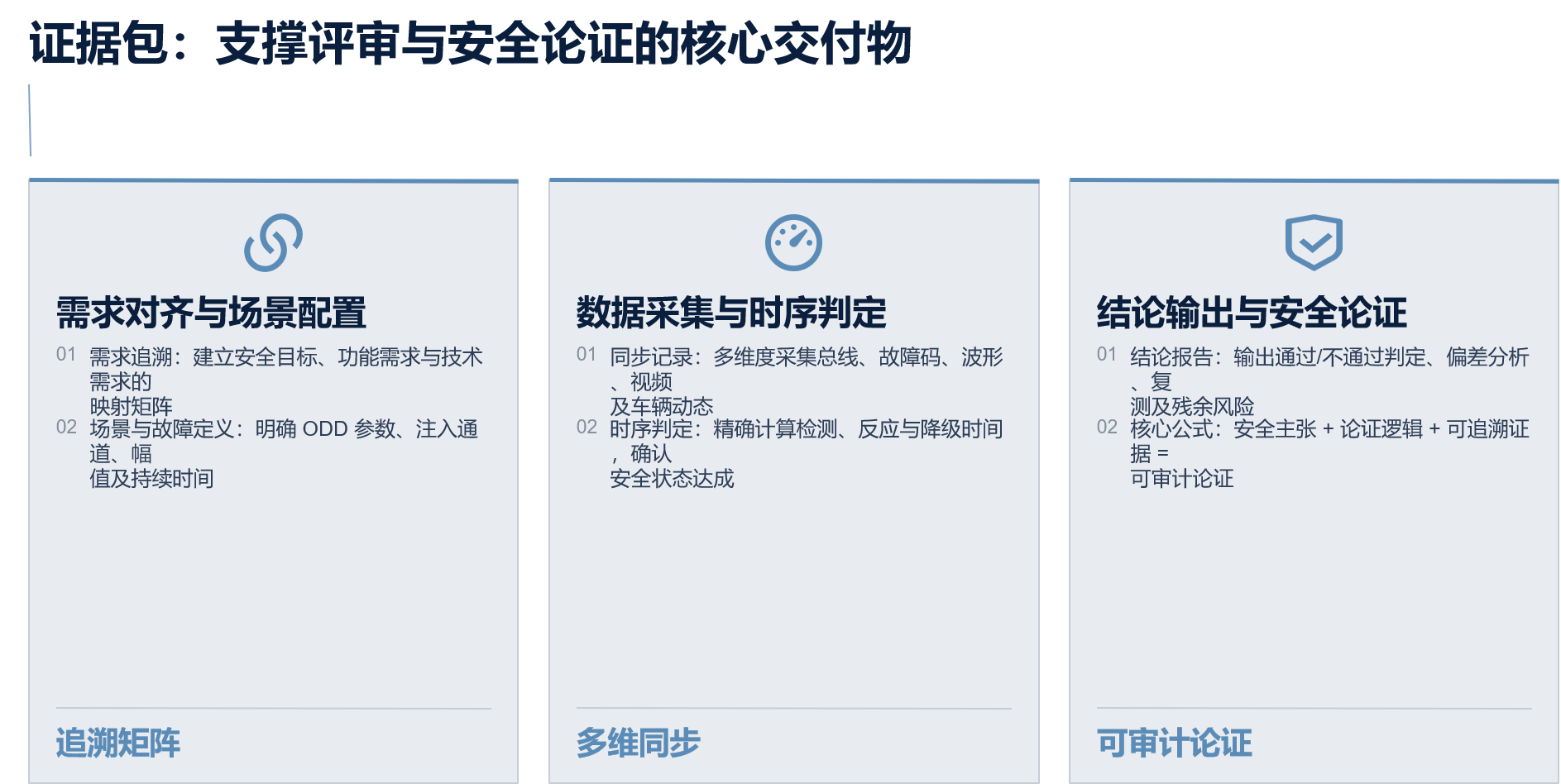
图8 VaHIL证据包:从安全目标到测试结论的可追溯结构
测试场景应从安全目标推导,至少为每个安全目标选择一个代表场景;注入故障后,需要评价故障瞬间与进入安全状态后的制动、转向和其他可操作性,并测量从故障注入到安全状态的时间间隔是否满足EOTI/FTTI。
真正成熟的交付物不是“测试通过”四个字,而是一份能追溯到SG/FSR/ASIL、能复测、能解释差异的工程证据包。
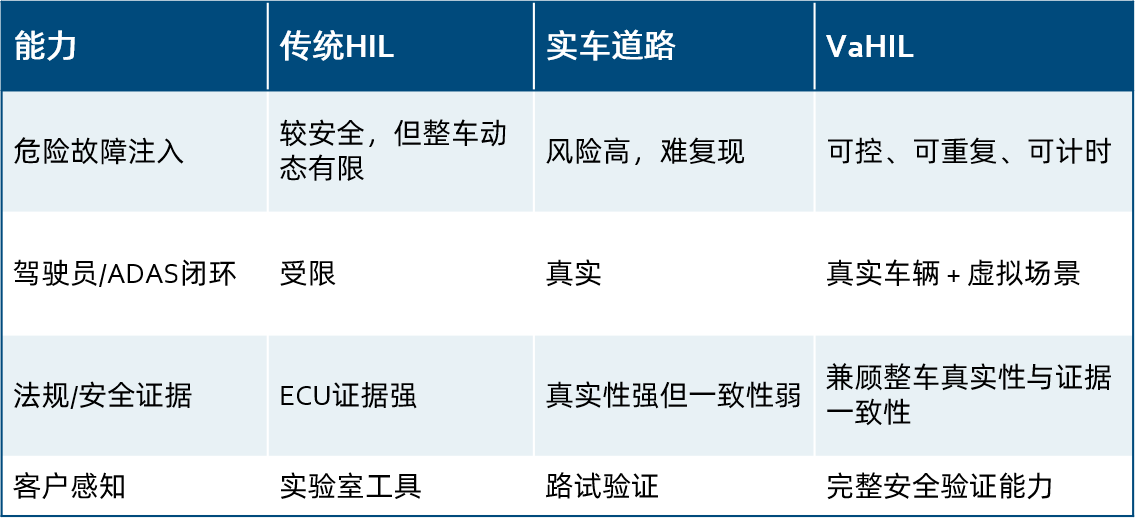
8、VaHIL不是替代所有测试,而是补上最关键的验证空白
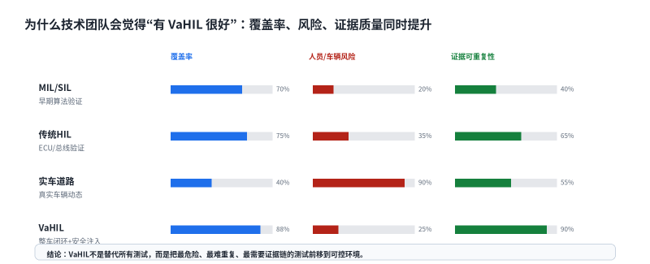
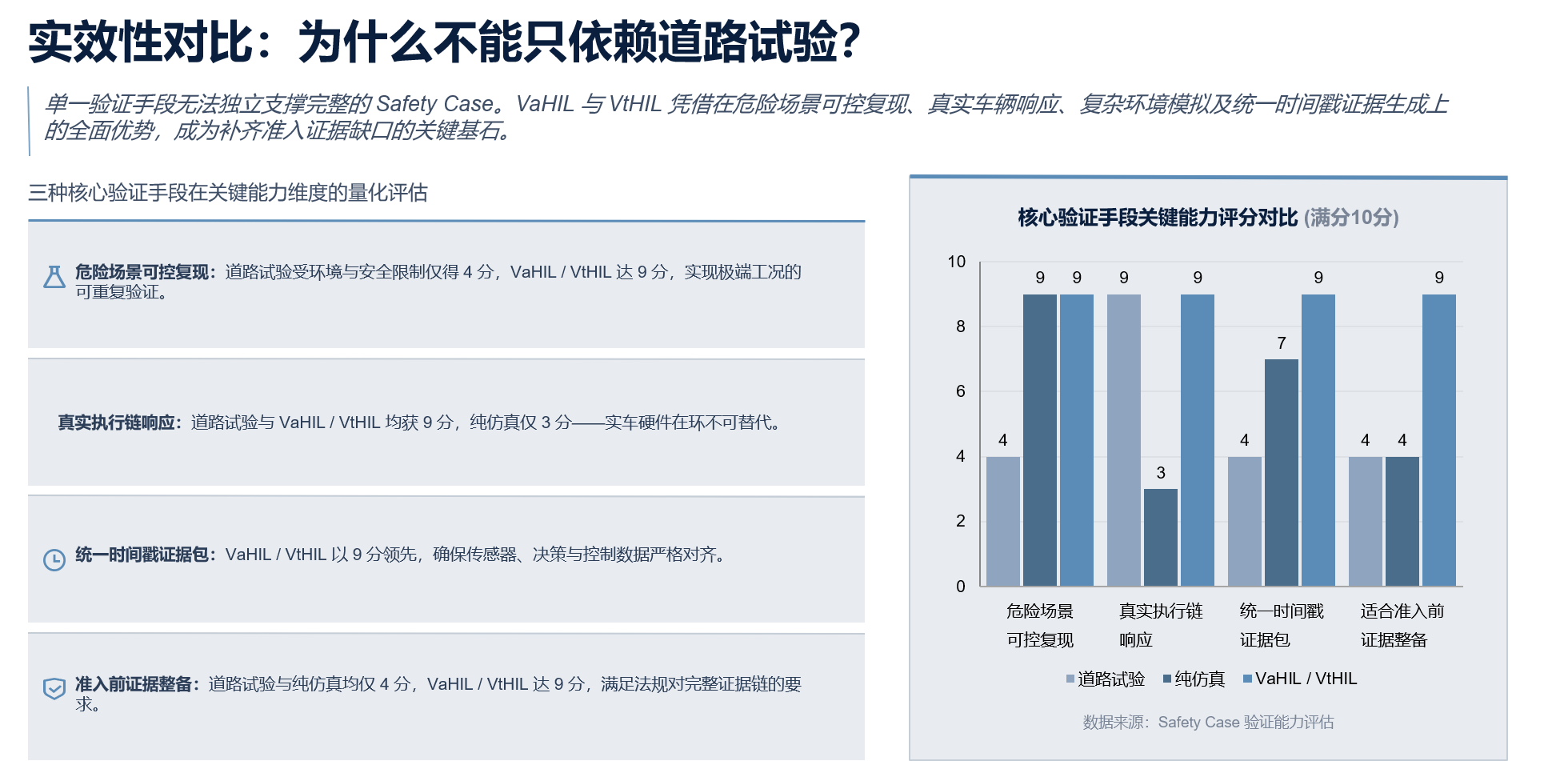
图9 测试方法对比:VaHIL适合承担高风险、高重复性、高证据要求的场景
MIL/SIL适合快速迭代模型和软件逻辑;传统HIL适合ECU、总线和I/O验证;实车道路测试适合正常行驶和最终确认。但对线控底盘来说,最难的是“故障状态下的整车动态”。这类场景既危险,又需要毫秒级时序,还要求车辆、驾驶员/ADAS、执行器和环境同步闭环。VaHIL刚好补上这一块。
不要把VaHIL讲成“更大的HIL”,而要讲成“线控底盘失效可控证据链的生成平台”。
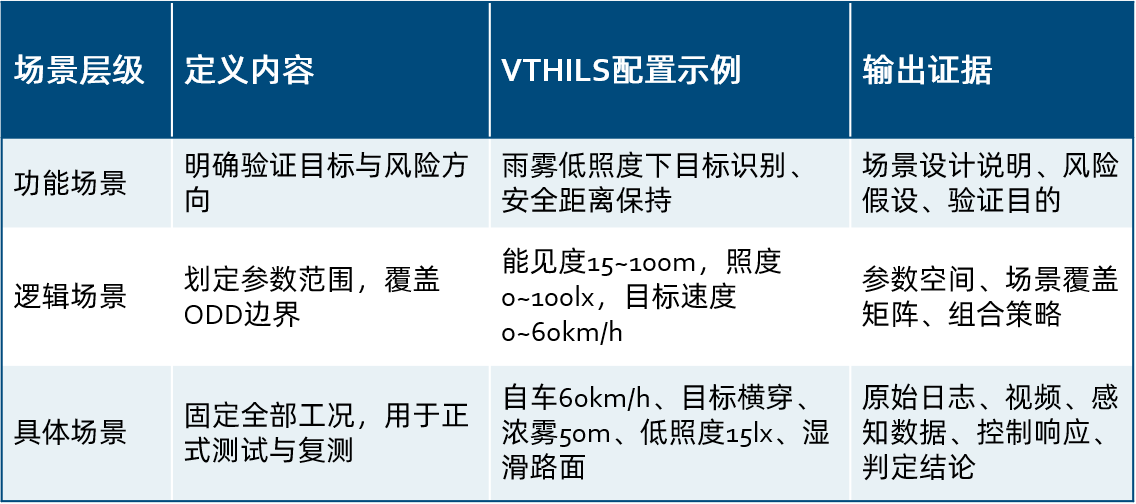
9、技术展望:从合规测试走向安全设计闭环

图10 建议路径:把VaHIL嵌入概念、设计、台架、整车和量产评审闭环
国标落地只是起点。真正有远见的团队,会把安全验证前移到概念和设计阶段:先用HARA和安全目标定义问题,再用故障注入矩阵设计测试,最后用VaHIL在真实整车闭环中确认可控性和证据完整性。这样,测试不再只是“最后过关”,而是持续反哺安全架构、控制策略和故障库的设计工具。