潮起千帆竞,风劲满目新
2024年,IAE智行众维以“仿真赋能 数据驱动”为战略指引,积极拥抱发展机遇、顺势而为,以创新技术服务于智能新能源汽车产业。在2025年到来之际,让我们跟随时光的镜头,回顾2024年的精彩瞬间…
技术创新篇

4月,携手中汽协会下属公司众链科技联合发布Coral-Data(珊瑚数据)开源计划,旨在解决智能驾驶行业对算法训练及仿真测试应用的迫切数据需求,通过仿真合成数据解决Corner Case等算法训练、数据缺乏的问题,真正意义上打破仿真测试场景及训练数据集使用的壁垒,支持跨企业、跨平台的合作。2024年内已累计发布八期Coral-Data开源数据集。
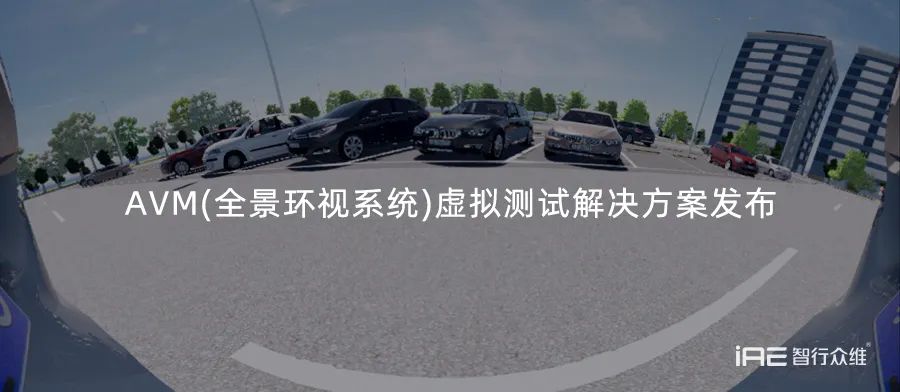
8月,发布AVM(全景环视系统)虚拟测试解决方案。该技术通过在DEEP OCEAN.AI仿真环境中搭建AVM虚拟标定间,利用多个超广角鱼眼摄像头同时捕捉车辆周围的环境影像,利用先进的算法合成鸟瞰图,以直观地呈现出车辆周边的情况,为驾驶员提供全方位的视角。该技术正逐渐成为提升驾驶体验和安全性的关键支撑技术之一。

10月,建设并被苏州市授牌“车路云一体化仿真测试与验证实验室”,重点围绕虚拟仿真和混合仿真的综合测试验证平台研发,通过构建车路云一体化多源数据仿真场景库,模拟真实的驾驶场景来全面评估和验证智能网联汽车的技术性能与安全性,加速自动驾驶算法的开发及验证。
10月,“基于人工智能的自动驾驶数据闭环及仿真系统的研发”入选2024年度苏州市关键核心技术“揭榜挂帅”攻关项目:i.基于AI数据生成技术,丰富仿真测试场景、解决实验室及试验场测试场景不足的问题;ii.构建服务于端到端/大模型算法的,以车辆在环体系为代表的先进仿真测试解决方案;iii.提升测试效率和测试的可重复性,加速助力国产替代进口。
商业落地篇
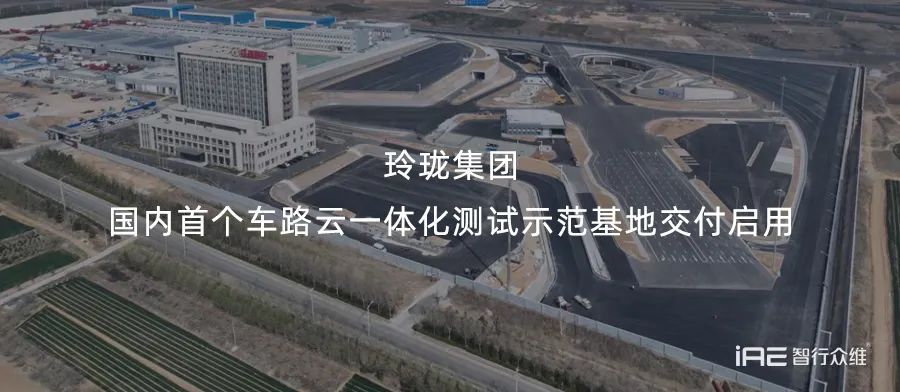
7月,联合玲珑集团中路慧能、国家智能网联汽车创新中心合作共建国内首个涵盖100多个场景的立体式智能网联研发测试场,面向智慧交通和自动驾驶等应用领域,打造封闭式车路云一体化智能网联测试场,提供车路云一体化测试验证及评价技术,可为全国20个试点城市提供测试数据支撑。
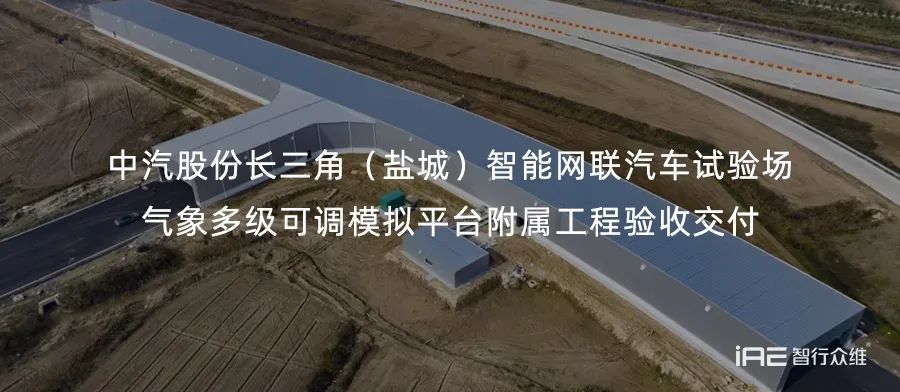
11月,由中汽股份投资、IAE智行众维负责设计建设的长三角(盐城)智能网联汽车试验场气象多级可调模拟平台附属工程验收。该项目是基于国家重点研发计划“新能源汽车”专项课题 “智能汽车复杂场景数字-物理融合模拟测试技术研究”完成的一项重要研究成果,支持 “真实车辆+真实传感器+V2X通信+天气环境+交通环境+道路环境模拟”的自动驾驶仿真测试评价。
目前,凭借行业领先的工具链和数据相结合的新型解决方案,IAE智行众维已成功服务智能新能源汽车产业链上数百家客户,与一汽、上汽、东风、长安、吉利、日产、赛力斯、中汽中心、中国汽研、招商车研、国汽智联、中路慧能等主机厂、三方检测机构及科技创新企业展开了卓有成效的合作。
生态建设篇
数据生态建设
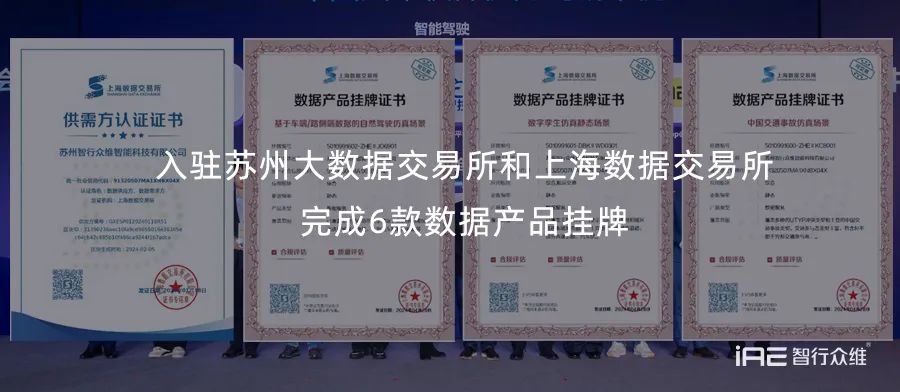
1月,正式入驻苏州大数据交易所,完成智慧出行类3款数据产品挂牌并获得首批“应用型数商”证书;5月,入驻上海数据交易所,并完成“水木灵境场景工场”系列共3款数据产品挂牌。
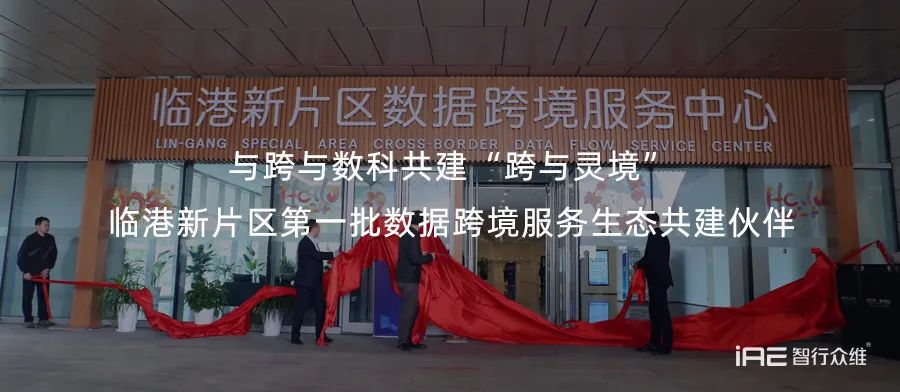
4月,与跨与数科共建“跨与灵境”,成为临港新片区第一批数据跨境服务生态共建伙伴,双方将联合构建一批前沿性、引领性、可操作性的智能网联汽车超级场景。

5月,与中国电信达成数据要素战略合作,共同探索智能交通及智能网联汽车产业的数据价值创新,推动数据要素流动与价值释放,共筑数据产品和产业新生态。
7月,“水木灵境”场景数据工场成功入选《2024 北京“数据要素×”典型案例集》。
11月,携手中国汽车工业协会、中国信通院和多家主机厂合作伙伴,共同启动“汽车行业可信数据空间”建设,构建可信可管、互联互通、价值共创的汽车行业可信数据空间。
12月,江苏省首批“数据要素×”典型案例正式公布,IAE智行众维深入参与的《车联网(智能网联汽车)数据空间》项目成功入选交通运输领域典型案例。
车路云一体化生态建设

4月,与国汽(北京)智能网联汽车研究院有限公司、中路慧能检测认证科技有限公司在山东招远举行战略合作签约仪式,联合共建智能网联汽车车路云一体化测试示范基地。
10月,与中国电信等生态伙伴共同发起成立“中国电信车路云一体化生态合作联盟”,加强技术攻关和合作,深化产学研融合,助力车路云一体化方案商业落地。

10月,入选苏州市智能网联汽车“车路云一体化”应用试点数据应用端战略生态伙伴。各方将围绕商业驱动技术、技术助推商业的双轮发展模式,聚焦智能网联、智慧城市、智慧能源、智慧交通“四智融合”,以数据资产化带动数字基础设施的保值、增值,推动“车路云一体化”的可持续运营。
产教融合篇
3月,与吉林工程技术师范学院、吉林省工师教育科技集团有限公司举行智能网联现代产业学院成立大会,三方达成战略合作并正式揭牌“智能网联现代产业学院”。
5月,联合常熟理工学院建设的元宇宙校企合作仿真实训基地成功入选2024年苏州市元宇宙重大应用场景需求项目,为高校提供安全高效的学习、实训和实践环境,加速智能网联高层次专业人才培养和技能提升。
资质荣誉篇

9月,成功入选“2024毕马威中国领先汽车科技企业50”榜单。作为汽车科技领域最权威的评比之一,毕马威中国领先汽车科技企业50榜单持续关注汽车领域科技创新,展望汽车产业发展动向,从技术创新、核心业务、财务健康、资本认可等维度对候选企业进行全面评估。
9月,“智能网联汽车AI驾驶员安全测评平台”在2024金砖国家工业创新大赛“人工智能-大模型”赛道闯入决赛并获优秀项目奖。该平台基于“新三支柱法”仿真测试技术体系并融合AI大模型的合规评价体系,搭建了一套智能网联汽车“人工智能驾驶员”运行安全仿真测评体系,来保障智能网联汽车安全、合规上路,并实现对智能网联汽车车辆运营的安全监管,填补行业空白。

10月,获“2024年度ASAM优秀合作伙伴”称号,IAE智行众维创始人&CEO安宏伟、联合创始人&CTO李月分别受聘为C-ASAM标准专家库专家。

11月,“X-In-Loop自动驾驶仿真测试系统”于2024中国汽车软件大会荣获2024中国汽车软件智能驾驶领域优秀创新案例。
鞍马犹未歇
战鼓又催征
2025新程已启
IAE伙伴们将守初心,勇突破
共赴星辰!