听起来简直是中国版“生死时速”,然而随着新闻的发布和事件的发展,炒作的嫌疑也越来越大。相信大家对事件都会有自己的想法和认知,这里不多作评价。不过,智行君要提醒大家,定速巡航和制动系统同时失控确实是极小概率事件,但也不能完全排除车载网络堵塞等故障,为安全起见大家千万别实车亲测,还是坐等奔驰技术团队对事故车辆的专业检测结果吧。
“Uber自动驾驶车辆致死行人”
美国东部时间3月19日晚间10时许,一辆Uber无人驾驶车辆在亚利桑那州的坦佩市撞到一位女性行人致其死亡。相比“奔驰定速巡航失控“的戏剧性情节,自动驾驶致死事故显得太过沉重。这起严重的交通事故显然给自动驾驶“未来已来“的局面蒙上了一层阴影。

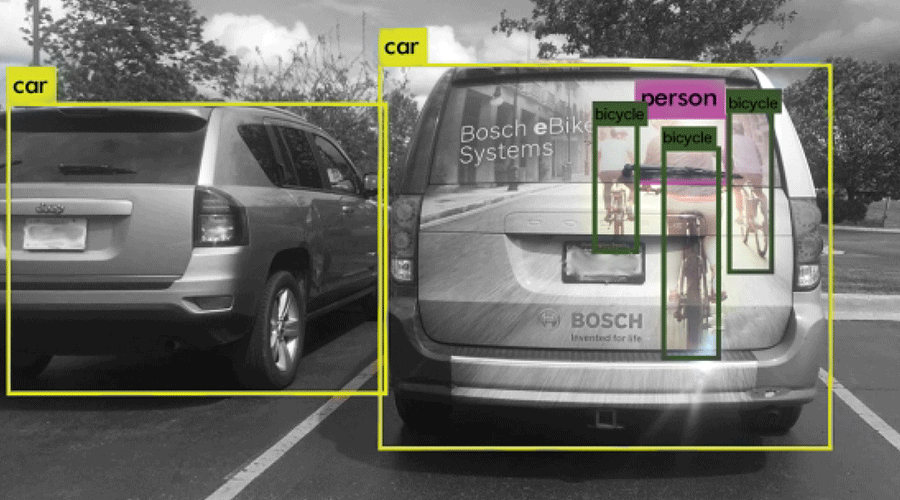
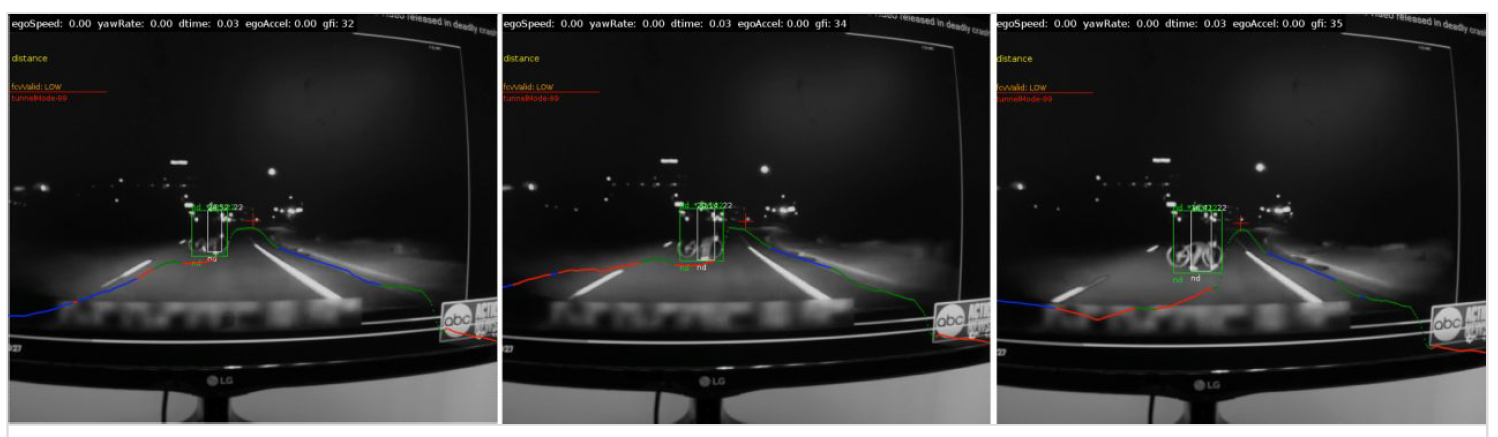
传感器未能采集到行人穿行的信号?
决策系统未能判断行人的意图?
如果是非自动驾驶的车辆,在相同的情境下能否避免事故的发生?
伤痛之后,对问题的分析和解决才能够真正推动科技的发展、产业的跃迁。
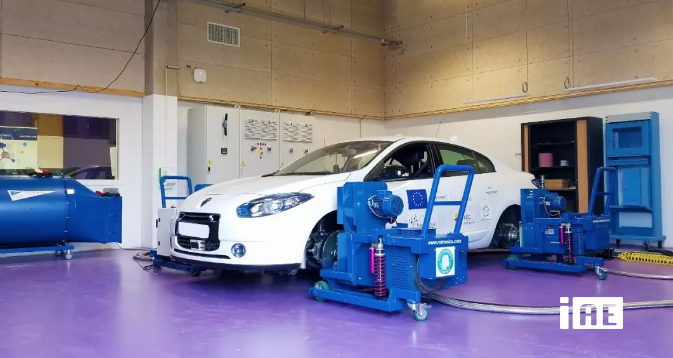

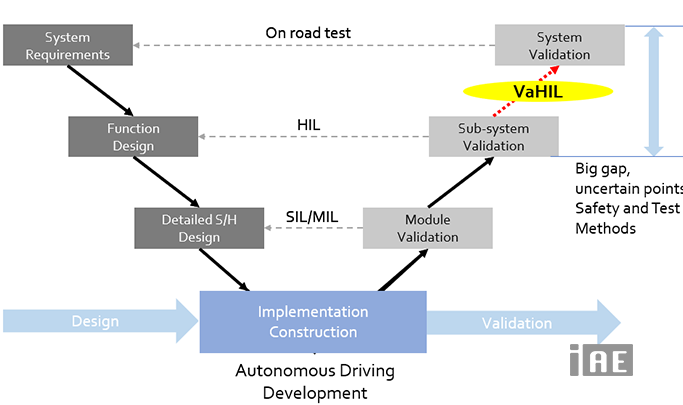
实验室负责人Yohan BOUVET教授认为,在智能驾驶车辆进行路试前,必须在实验室内对车辆进行充分的、整车级的测试和验证,尤其是对控制算法和决策系统进行充分验证和优化。
BOUVET教授与智行君分享了实验室的一个研究方向:智能驾驶控制系统的验证中,一个重要环节是验证控制系统能否对传感器失效做出正确判断和合理响应——如果传感器全部有效,智能驾驶系统应正常工作;如果传感器全部失效,智能驾驶系统停止工作;但是如果某个或某些传感器信号异常,控制系统能否识别并且又该怎样决策?
智行君作为自动驾驶领域从业者之一,也反复在思考,当自动驾驶对传感器的依赖被提到绝对的高度之后,控制算法及决策系统的安全性验证是否也得到了同样的重视;在推动智能驾驶产业前行的过程中,企业是否有急于求成以致冒进,采用的方法论和流程是否足够完善和严谨?
媒体及大众对热点的关注,其核心是对科技飞速发展所可能带来的安全问题的担忧。希望国内外几位教授的观点,以及SIVALab实验室的研究工作能为致力于自动驾驶研发的朋友提供一些有益的启发。