文章素材来源:汽车纵横网??链接:http://www.autoreview.com.cn
2025年7月10-12日,2025中国汽车论坛在上海嘉定举办。本届论坛主题为“提质向新,智赢未来”,由“闭门峰会、大会论坛、技术领袖峰会、多场主题论坛、N场行业发布、主题参观活动”等15场会议和若干配套活动构成,各场会议围绕汽车行业热点重点话题,探索方向,引领未来。其中,在7月12日上午举办的“主题论坛七:AI创新引擎,驱动智慧出行新生态”上,苏州智行众维智能科技有限公司总经理安宏伟发表精彩演讲。以下内容为现场演讲实录:

各位领导,各位同仁,大家上午好!
非常高兴有机会在汽车论坛和大家再次分享IAE智行众维在自动驾驶和通用AI仿真测试领域所做的探索和实践。
今天给大家汇报的题目是“仿真走向跨域融合,世界模型应用提速”。分为三部分:
一是,自动驾驶仿真测试相关方向目前在做的具体工作。
二是,仿真测试服务于多域多应用场景AI落地所做的探索、实践。
三是,我们探索和研究的方向,世界模型如何应用于AI相关的训练、测试、验证。
一、自动驾驶仿真测试现状
给大家汇报我们公司目前围绕自动驾驶做的相关工作。自动驾驶是人工智能皇冠上的明珠之一。对于自动驾驶而言,经历了算法由规则驱动到由数据驱动的进化。同时,数据驱动的大模型也在经历由大语言模型到世界模型的跃进和变化。
对于AI系统的安全,包括AI系统运行安全,我们需要通过仿真测试来确保,这已经是行业的共识。从仿真和测试的角度来讲,需要有工具链、数据对AI系统安全进行评测、训练、验证。这里有两个看似存在矛盾的要求,既希望在仿真测试过程中能实现加速,同时还要确保它的真实,这是“既要还要”的矛盾共存体。
在测试过程中,早期基于规则驱动,或者做ADAS L1和L2级别辅助驾驶的时候,每次测试只需要几百或者上千条测试用例就可以满足对安全性、功能完整性的覆盖。但是进入到L2+,更高阶的辅助驾驶阶段,以至L3级别自动驾驶后,我们所面临的场景、测试需求将呈指数级的增长。在AI算法上车、面向数据驱动时代,我们测试的方法论、需要的数据量会有很大的变化。
伴随AI算法上车,大家对此有很高的期望和预期,但实际的情况如何呢?以美国国家公路交通安全管理局统计的数据为例,2024年相比于2023年,由于自动驾驶所导致的交通事故上升了45%,其中有10%是致命的,是非常关键的事故。自动驾驶的安全到现在为止依然是行业里的挑战,国内的情况就不多说了,是相通的。
自动驾驶发展到今天,和AI领域的多数场景一样,从技术端在数据方面依然面临瓶颈和挑战,前面各位同仁已经做过详细的介绍,不再多说。从IAE智行众维的角度,针对AI系统的功能安全、预期功能安全、运行安全提出了什么样的技术路径做响应?两个闭环:数据闭环、工具闭环。
通过仿真赋能数据驱动的路径和手段,保障AI系统从研发设计到实际商业落地过程中的安全性。
(1)技术闭环。
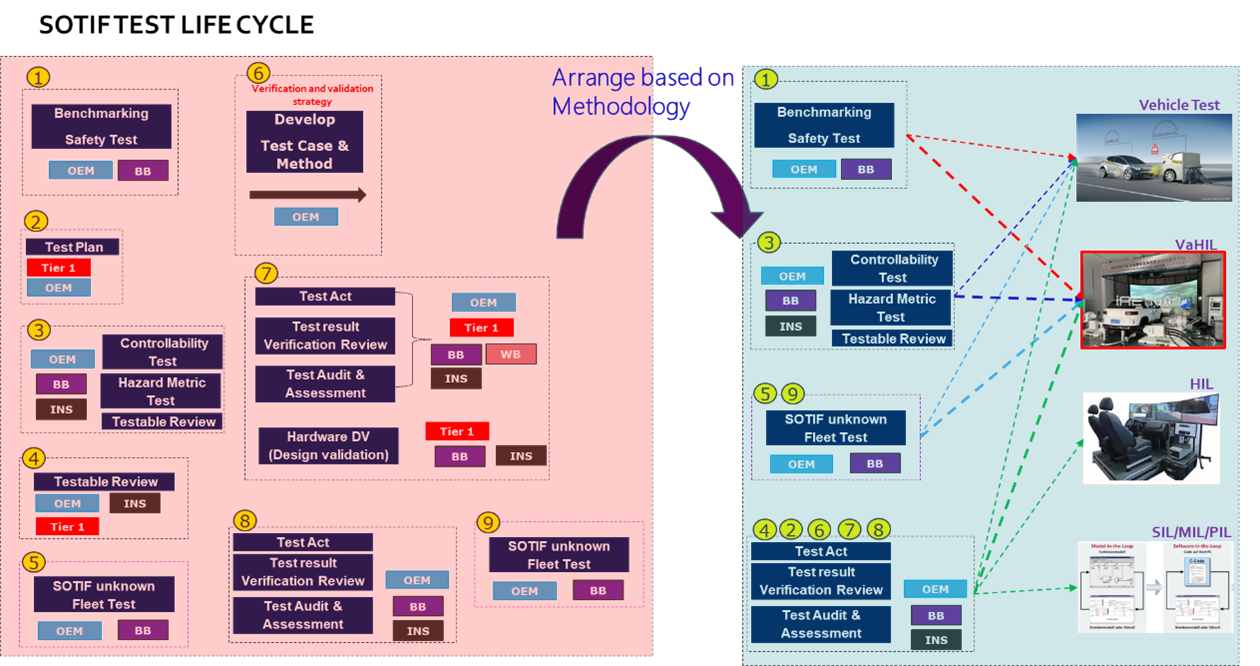
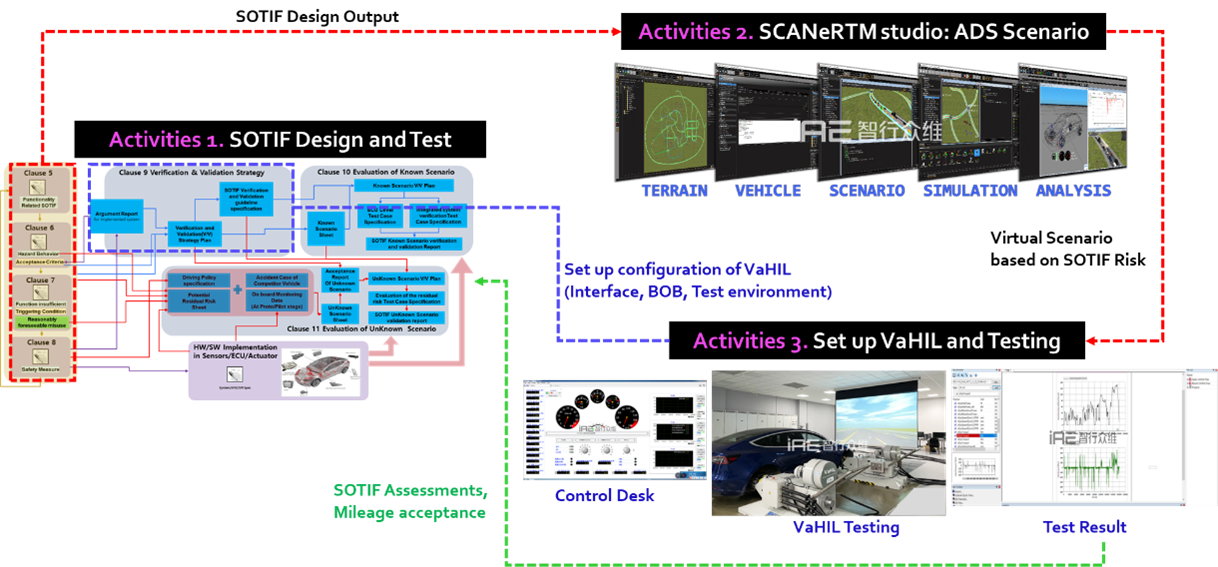
打造和搭建了一条仿真测试的完整工具链,基础是X-In-Loop技术体系,对于自动驾驶汽车,由于车辆的复杂性,包括在道路行驶对安全性的极致要求,只在硬件、软件或者云端单一条件下做相应的训练和测试,对于确保它的安全是远远不够的。对于这样复杂的、对安全有极致要求的应用场景,我们需要一个技术体系、一套工具链来保证安全。
既需要有虚拟仿真来满足我们对加速、效率的要求,也需要有各种虚实结合、混合仿真的方式来确保其真实性。从仿真测试的角度来讲,大家在汽车行业曾经有过设想,仿真完成90%,试验场完成9%,路试完成1%,但和原有的ISO“三支柱法”一样,已经不能适应于目前高阶辅助驾驶、自动驾驶的测评需求,我们的目标是要在实验室里通过虚拟仿真、混合仿真结合的手段和技术,把更多的长尾工况、Cornercase加以覆盖。
在这个工具链路里,我们提出了在汽车其他性能测试中原来所没有的实车在环闭环测试体系,把智驾、座舱、功能安全、预期功能安全、线控底盘等相关领域的安全需要,在上路和进试验场之前完成相应的测试验证。
(2)数据闭环。
在过去几年里我们打造了“水木灵境”场景工场,这里的“场景数据”来自车端、路侧、法规、交通事故、AI生成,服务于我们对智能驾驶算法训练和测试要求。2023年开始,在行业里我们联合主机厂,包括吉利、上汽、长安、广汽等也在一起探讨这方面的数据应用,在此也很感谢行业合作伙伴们给予的支持。去年公司在数据这一板块产生了几千万的收入,这也是智能化发展到当前阶段,高阶算法的测试验证对数据有越来越多的需求。
二、仿真测试走向跨域融合
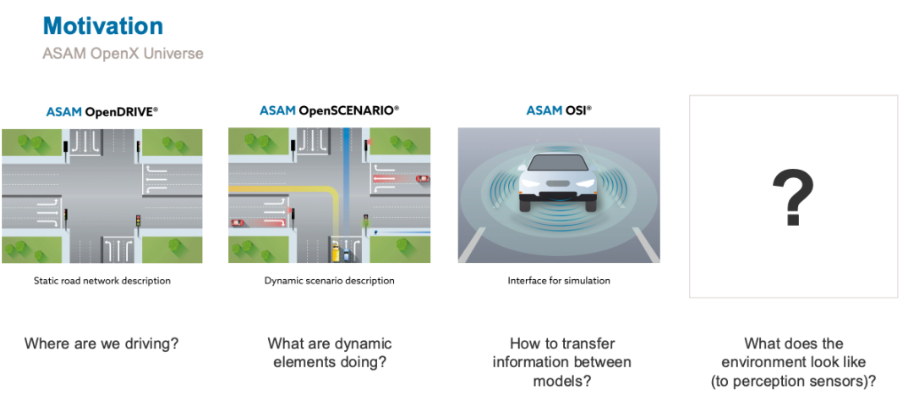
2023年到2024年,因为大模型的商业化落地,包括在车端的应用,也带动了AI在其他领域,包括飞行汽车、低空飞行器、通用机器人等方向的发展。应整个市场发展趋势、技术发展趋势的需求,我们原来所做的仿真工作也在由地面二维交通拓展到三维的低空,拓展到通用机器人,甚至包括在无人驾驶船舶等其他领域;响应AI应用场景往智慧出行的发展,工具链和数据体系也在做相应的拓展和进化。仿真所做的工作,由智能网联汽车地面的二维平面模拟,在往三维,往空间智能领域做拓展。目标是服务于更广义的智慧出行、AI应用场景落地的需要。
以具身智能、人形机器人为例,类似于自动驾驶,这些AI应用场景既有巨大的机遇,同时也有面临的问题和挑战。不论是足球赛还是机器人马拉松,当前阶段还需要人的远程操控等诸多支持,包括对肢体、动力学的训练和测试明显都是不足的。
同样,在数据端也面临着挑战和问题。该如何响应这一挑战?这里分享一下我们的思考。近些年来对于合成数据、数据集、场景库,整个行业都做了大量探索,这期间有基于真实数据做的场景重构,也有基于3D高斯、NeRF等神经网络渲染的方法做数据合成。这几年大家也在探讨世界模型的应用。当前,由于算力资源的提升,以及行业对数据的迫切需求和重视,世界模型的发展取得了比较大的进展。
我们和包括高校在内的生态合作伙伴一直在探索,对于满足如自动驾驶、具身智能、低空飞行等各类AI应用场景训练测试所需要的数据到底采用什么样的技术路径获取?如3D高斯这类神经网络渲染的数据有不可编辑性,生产成本高。而对于世界模型,原来受限于算法算力的不足,以及大模型本身有幻觉等诸多问题。
基于近年来相关技术的快速迭代发展,我们联合生态合作伙伴将世界模型作为跨域融合仿真、获取海量高质数据的技术底座之一。通过世界模型生产数据,赋能工具,为相关工具链提供AI增强,满足AI应用场景对数据量和质的要求,满足仿真训练测试对于加速性和真实性的要求。
三、助力世界模型应用提速
下面介绍一下我们在这个方向所做的探索和取得的进展。
AI模型目前正在经历从大语言模型到世界模型的进化,既要服务于汽车或飞行器等智能体,同时也是AI工具链和数据的基础。针对AI算法在车辆、低空飞行以及具身智能等领域应用,IAE正在把仿真工具链从二维平面向三维立体拓展,从而响应融合仿真对于工具链的需要,既基于我们所开发的DeepOCEAN.AI(深海AI虚拟仿真平台),实现从车辆到更广泛智慧出行的应用拓展。基于这一软件平台,针对车辆、飞行器和具身智能测试所用的工具链会有区别,但底层的逻辑是相通的。
数据层面,针对各种AI应用场景需要,公司技术团队基于已有的自然驾驶真实场景和各类真实数据生产合成数据。合成数据生成有不同的技术路线,可以是基于真实数据的重构和回灌,可以来自于神经网络渲染,也可以基于世界模型。
我们所选择的技术路线是基于世界模型,前面提到,和所有大模型或者生成式AI一样,我们面临着相同的挑战。
第一,数据从哪儿来?刚才韩昭总也提到真实数据可以来自于车端和路侧。我们和包括上海汽车城在内的生态伙伴,通过车路云系统的路侧设备采集自然驾驶真实场景数据,搭建仿真场景库并进而构建知识库用来训练AI模型。
第二,通过AI生成数据并进行泛化是获取海量数据的有效手段。但是对于AI模型而言,幻觉是我们必须面临的实际问题。国内有非常优秀的大模型,但幻觉率会到10%到15%。如何解决这一问题?如何让数据生产、仿真测试能够更好地回归本质,数据不但要量大,而且要求能更加准确、可用和好用,这是我们要解决的挑战。
这是IAE基于多源数据融合技术与AI驱动的合成数据生成的全链路。基于车端和路侧真实驾驶场景的数据采集和处理;在场景库和数据集构建的时候分为两个阶段,目前已经完成闭环的是基于AI增强技术的数据治理,以自然驾驶真实场景作为底座进行知识库完善和构建。同步,也在构建用于世界模型训练所需要的知识库,以及对模型进行调校和优化,最终形成算法训练和测试所需要的相关数据集,这是目前在做的工作和取得的成果。
这是在今年初,我们和众链科技一起发布的基于DeepSeekR1的AI场景生成的工具,以及面向训练的动态、静态的数据集。其中有部分数据,在众链科技介绍时提到的珊瑚数据开源计划中已经在做了发布,在此希望主机厂、零部件企业和高校伙伴共同来尝试,给予珊瑚数据计划以更多的反馈和支持。
通过构建多源数据融合和AI驱动的高质量数据体系,服务于自动驾驶等场景的测试验证,服务于算法训练,确保AI系统的安全。
下一步,我们将基于知识库和世界模型,以及AI增强仿真工具链,打造服务于自动驾驶和低空、具身智能等AI应用场景的融合仿真能力和数据集。我们和国内高校AI领域专家、英伟达等生态合作伙伴正共同探索,推进世界模型应用的落地和提速,更好地服务于智慧出行产业和生态。这方面也希望能和上海国际汽车城、中汽协会,以及更多的伙伴共同探索和实践。
仿真、测试、数据生成和应用都具有强实践性,所有产出成果都需要经过反复迭代和持续优化,才能成为真正有价值的经验和资产,从而推动行业的发展。
以上是我的介绍,非常感谢大家!
(注:本文根据现场速记整理,未经演讲嘉宾审阅)