岁末回望,步履铿锵。
2025年,在智能新能源汽车产业加速驶向城市场景与全球赛道的时代浪潮中,IAE智行众维作为自动驾驶和物理AI仿真测试领域的深耕者,始终以技术创新为引擎,以赋能产业为使命,与国家战略同频,与行业脉搏共振。
我们欣喜地将这一年的探索、收获与沉淀,凝聚于此份年度巡礼,让我们一同回顾,那些共同刻印在2025年的关键瞬间。
技术创新篇

2月,携手中国汽车工业协会下属众链科技,重磅发布全球首款集成DeepSeek R1大模型的AI场景生成工具。该工具通过语义理解与逻辑推理,实现“文本指令”一键生成符合OpenDRIVE与OpenSCENARIO双标准的高质量仿真场景文件,直击场景构建效率低、专业门槛高的行业痛点。其与DeepOcean.AI工具链深度融合,支持MLOps驱动场景自进化与全栈式私有化部署,将场景构建效率提升300%,为自动驾驶的算法训练与高效测试提供了安全可控的端到端解决方案。
2月,联合众链科技,重磅发布智能驾驶仿真数据集,并入选“苏州市首批行业高质量数据集”。该数据集着眼于行业对高质量、海量数据的迫切需求,通过车路云多源仿真合成数据,有效解决Corner Case数据缺乏等痛点,服务于端到端算法训练与测试,以领先的数据规模与质量,支持跨企业、跨平台的数据合作,加速了智能驾驶行业的数据生态建设。

3月,发布基于DeepOCEAN.AI仿真平台的智能车灯高精度仿真测试解决方案。该方案针对ADB、像素照明等智能车灯测试场景剧增、实车验证成本高昂等行业痛点,通过物理渲染(PBR)与高动态范围(HDR)技术,构建了逼真的数字孪生测试环境,实现从光照强度精确测量到动态交互功能仿真的全流程验证,显著减少了对物理试制的依赖,有效提升了开发效率并降低了合规风险。

3月,针对“重感知、轻地图、纯视觉”NOA系统的行业挑战,发布全要素、全场景NOA仿真测试解决方案。通过高保真传感器模拟与覆盖城市全要素的数字孪生场景库,精确还原复杂道路拓扑与高置信度动态交通行为,并设计四维测试矩阵直击算法短板。该一体化平台为纯视觉智驾系统提供了安全、高效、可扩展的全链路验证底座,助力其安全驶向城市复杂场景。
3月,发布数字孪生场景与GNSS模拟器融合方案,将虚拟车辆位置实时转化为真实卫星信号,为智驾系统创建高保真、安全可控的定位测试环境。该技术有效克服了地理限制与安全风险,大幅降低了实车路测成本,并可自由构建涵盖城市、高速、隧道乃至信号干扰的多样测试场景,显著提升了DIL、HIL、VIL等仿真测试环节的效率与真实性。

4月,发布DeepOCEAN.AI仿真平台的Crab自然驾驶场景处理工具。该工具通过“数据炼金”、“价值提纯”、“认知进化”三层核心能力,系统性解决了自然驾驶数据处理中质量低、提取难、分类去重效率低等行业难题。该工具实现了基于AI模型的数据清洗、关键场景智能筛选与自动化分类的流程闭环,显著提升场景构建效率与测试覆盖率,为基于真实数据驱动、破解自动驾驶长尾难题提供了高效的工程化解决方案。
5月,技术支持国际标准组织ASAM并发布ASAM OpenMATERIAL 3D 1.0.0标准。该标准旨在通过精准定义材料物理属性与规范3D模型结构,解决仿真模型中物理精度不足、资产交换不一致的行业痛点,为激光雷达、摄像头等传感器的高精度仿真提供关键支撑,有力推动了高保真数字孪生资产的标准化创建与跨平台无缝交换。
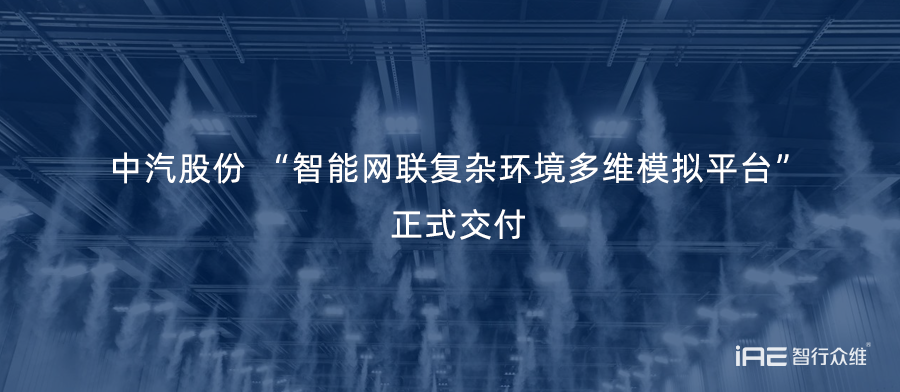
6月,交付中汽股份 “智能网联复杂环境多维模拟平台”项目。该平台创新建立了封闭实验室环境下的气象广域物理多级可调模拟方法,支持测试车辆在雨、雾、光照等不同复杂气象场景下的自动驾驶测试,同时结合可控信号灯、移动目标物等技术,为自动驾驶整车、感知零部件、智驾算法等测试提供定量的可复现气象环境场景,基于该平台也可以融合数字模拟测试技术,支持在虚拟环境中进行各类仿真场景测试。智能网联复杂环境多维模拟平台为智能网联汽车测试搭建起一座场景丰富、专业严谨的“气象试炼场”,让智能网联汽车在面对现实世界中的光雾雨电时能更加从容不迫,为未来智能交通的安全出行保驾护航。
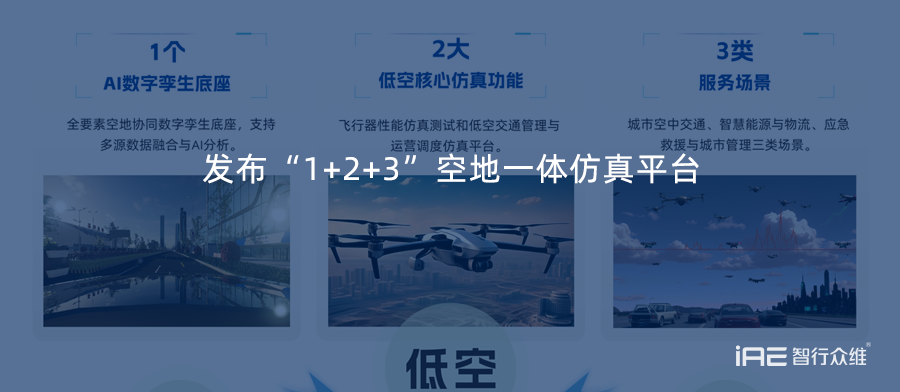
8月,发布“1+2+3”空地一体仿真平台。以AI和数字孪生技术为底座,通过多源数据融合,支持飞行器性能仿真测试及低空交通管理调度,覆盖城市空中交通、智慧能源物流和应急救援与城市管理三大应用场景,为无人机研发、低空空域管理、航线规划、风险预警构建精准高效的“空地一体”的测试与验证环境。

10月,《汽车行业可信数据空间研究报告》发布。IAE智行众维作为核心技术方深度参与了国家《汽车行业可信数据空间》的建设。依托汽车行业可信数据空间,为汽车行业奠定“可信、可控、可计量”核心框架,助力破解智能网联汽车产业的数据孤岛难题,为产业提供安全合规的数据流通技术底座,在数据协同应用场景中贡献了关键技术力量。
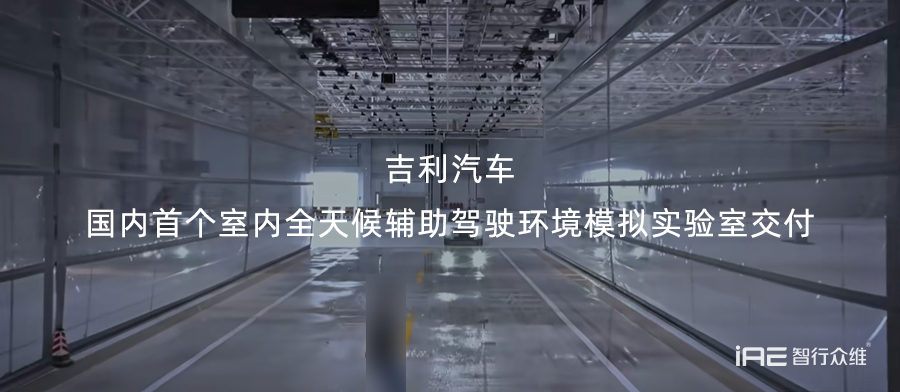
11月,交付吉利汽车国内首个室内全天候辅助驾驶环境模拟实验室。该实验室是吉利全球全域安全中心的核心组成,创新实现了对雪、雾、雨、阳光、闪电等极端自然环境的精准复现,可模拟从15毫米至100毫米每小时的降雨及多等级能见度雾气。结合真实光线与交通信号数据,构建出多达264种极端真实场景,为吉利汽车的辅助驾驶系统提供了全天候、高效率、高精度的测试验证平台。

12月,公司深度参与建设的中路慧能“车路云一体化”封闭测试基地建设项目成功终验收。此项目成功整合了数字仿真与物理测试,有效解决了车路云协同技术验证场景复杂、成本高昂的行业痛点,为智能网联汽车标准验证提供了关键技术支撑与标杆案例。
生态建设篇
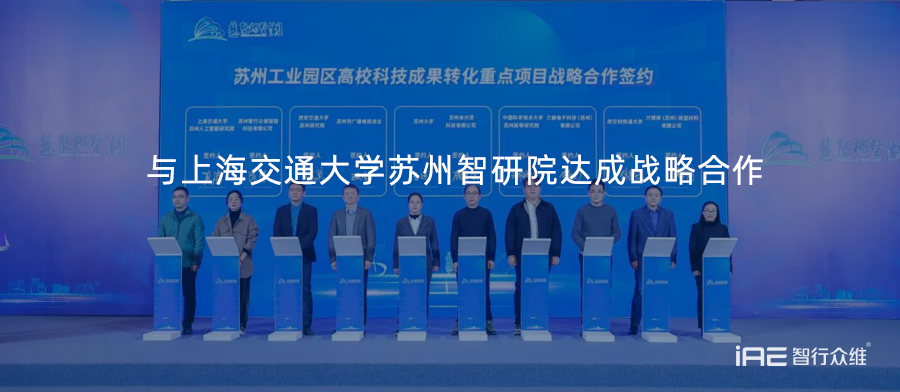
1月,与上海交通大学苏州人工智能研究院达成战略合作。聚焦《基于人工智能的自动驾驶数据闭环及仿真系统》这一重点研发项目,双方将围绕AI数据生成、端到端算法仿真测试等方向展开合作,旨在解决实验室及试验场测试场景不足、测试效率与可重复性低等核心痛点,加速先进仿真测试技术的国产化替代进程。
3月,作为发起建设单位,与清华大学苏州汽车研究院、云控智行等多家企业和机构,共同参与组建了“车路云一体化智能网联(青岛)应用研究院”。此合作旨在构建具有青岛特色的全域协同车路云一体化应用体系,聚焦前湾港城集疏运、高速公路先行建设等具体场景,旨在解决区域产业应用场景分散、规模化落地难的痛点,通过多方协同打造可复制推广的“青岛方案”。
8月,与阿里云、中信科智联等多家单位在德清共同签署“车路云一体化”数据合作协议。公司将参与共建德清车路云数据生态,重点探索高价值数据的合规共享与融合应用,旨在解决车路云数据分散、缺乏高效流通利用机制的痛点,为技术商业化落地筑牢数据底座。
10月,加入中国道路交通安全协会。未来将深度对接协会的交通安全事故数据资源与行业需求,致力于将自身在交通事故场景仿真重构方面的技术积累,应用于提升道路交通安全水平的实际工作中,解决智能网联汽车安全测试与真实道路交通风险脱节的行业痛点,推动仿真技术为交通安全事业创造更大价值。

11月,与韩国VWAY公司签署战略合作协议。双方将共同推进X-In-Loop仿真测试技术体系与融合安全技术及AI工作流的合作开发,共同打造行业领先的融合安全解决方案,并联合拓展韩国及欧洲市场,解决AI系统安全验证的国际性技术挑战。
产教融合篇

4月,接待商务部主办的“发展中国家落实2030可持续发展议程研修班—产业创新专题”一行。来自12个国家的36名高级政府官员参观IAE智能仿真中心,并体验了智能座舱模拟器,双方就AI大模型在汽车行业的应用、安全挑战及解决方案进行了座谈交流。此次活动为公司的技术实践与国际合作拓展搭建了良好平台。

9月,作为技术支持单位,为上海市总工会主办的“智能网联新能源汽车技能竞赛”提供稳定可靠的工具链平台及技术服务。本次竞赛聚焦数据标注与网络攻防两大方向,旨在选拔和培养行业专业技术人才。公司通过支撑赛事,深度参与了行业核心技能的标准建设与人才发掘工作,为行业发展提供人才保障。

10月,与苏州大学机关与直属单位党委联合开展主题党日活动。苏州大学党委书记唐文跃一行到访,公司详细介绍了在智能网联仿真测试及低空经济领域的核心技术、创新成果与战略布局。双方就智慧出行、低空经济、具身智能等话题深入交流,并探讨了在党建引领下深化校企人才培养、技术交流与成果转化的合作可能。
产教融合篇
3月, IAE智行众维申报的“车路云多源数据仿真场景实验室”成功入选“苏州市数据创新应用实验室”。该实验室旨在通过车路云多源数据采集、处理及工具链研发,构建具有城市特色的仿真场景库,解决Corner Case等高质量数据缺乏问题,赋能科技创新发展。
4月,成功入选由中汽信科等机构联合发布的“中国汽车产业科创企业投资潜力TOP30榜单”。该榜单依据行业前瞻价值、技术创新、成长潜力等多维度严格评审,旨在挖掘新质生产力。公司凭借其X-In-Loop仿真测试系统与场景数据工场等核心能力获得认可。
7月,Jellyfish(水母)自动驾驶仿真平台入选2025年度江苏省“三首两新”认定技术产品名单。
9月,在国家数据局重点标准验证试点工作中,成功入选“高质量数据集”和“数据服务”两个方向的标准验证试点典型单位。这标志着公司在数据领域的实践能力获得国家认可,将致力于推动行业标准研发落地,打造合规、安全、高效的数据产品和服务体系。

9月,凭借卓越的技术创新能力成功的商业落地与广阔市场前景,再度成功入选“2025毕马威中国汽车科技50强”榜单。该榜单是中国汽车科技领域极具权威性的年度评选。公司构建的AI赋能工具链、数据、服务三位一体解决方案,填补了行业从系统级到实车测试验证的关键空白,彰显了行业领先地位。
9月,子公司西部水木灵境(IAE-Meta)作为联合体单位,成功揭榜重庆市“舱驾融合的AI原生智能整车系统”关键软件“揭榜挂帅”项目。该项目由重庆市经信委主导,旨在攻克产业关键技术难题。IAE-Meta将通过实时数据同步与动态渲染优化等技术参与攻关。
9月,凭借“车路云一体化项目极寒场景数据集开发及应用”项目,荣获2025年“数据要素X”大赛吉林省分赛二等奖并成功入围国赛。该项目基于AI和数字孪生技术重构极寒冰雪仿真场景库,创新填补了智能驾驶仿真测试体系在极寒场景数据方面的行业空白。
9月,在中国汽车工业协会主办的“数据赋能 乘数而上——汽车数据创新应用大赛”中,“车路云多源数据场景助力构建智能座舱安全屏障”项目荣获一等奖。该赛事是国家数据局“数据要素X”大赛的汽车行业分赛。项目通过构建高保真仿真测试环境,为智能座舱HMI功能测评提供了关键“数据标尺”与“决策依据”。
10月,由上海财经大学牵头、IAE智行众维共同参研的国家数据局首批课题《推动我国数据事业高质量发展的战略与体制机制研究》顺利结题。公司在研究中贡献了数据资产开发应用领域的实践经验与案例,相关成果将为我国数据事业的顶层设计与政策制定提供参考。
12月,IAE智行众维旗下子公司苏州泛科众维智能科技有限公司凭借其出色的自主研发能力与创新实力,成功通过国家高新技术企业认定。
风劲帆满图新志,笃行不怠启新篇。
回望2025,成果筑基石;
展望2026,新篇待开创。
IAE智行众维正在推进物理AI+(以自动驾驶为代表的)产业三个发展趋势:
趋势一:验证方式从虚拟仿真走向物理闭环,推动跨越“视觉真实”达到“物理真实”
趋势二:数据来源从单点采集升级为世界模型全域共生
趋势三:应用场景从自动驾驶扩展到三维空间智能
仿真与测试已不仅是研发工具,仿真验证是智能体时代的“基础设施”,仿真测试与合成数据的能力,正成为智能体产业规模化落地的“关键供给”。