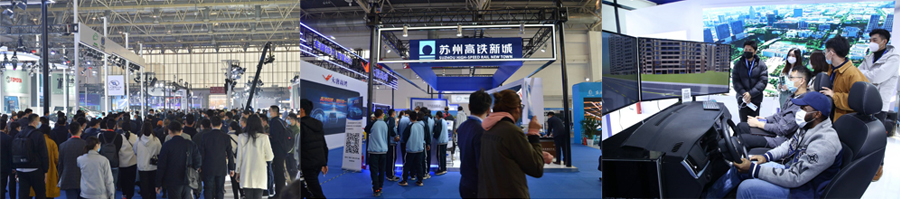
9月14日,Automotive Testing Expo China 2020 于上海世博馆正式开幕。
在ATE展会,IAE继2018年推出高级整车在环(VaHIL),2019年发布数字孪生仿真场景库之后, 今年又以云加速海量仿真平台继续成为技术和市场发展的风向标。
展会现场,IAE智能驾驶仿真测试全栈式解决方案获得高度关注。尽管有疫情的影响,但IAE展位依然人流如织。

热点演讲 与您分享云仿真测试的精彩
展会首日,IAE技术副总李月发表了题为《云赋能海量仿真,智能驾驶开发迎来天作之合》的专业技术报告,现场来自客户、上下游合作伙伴和友商的观众座无虚席。
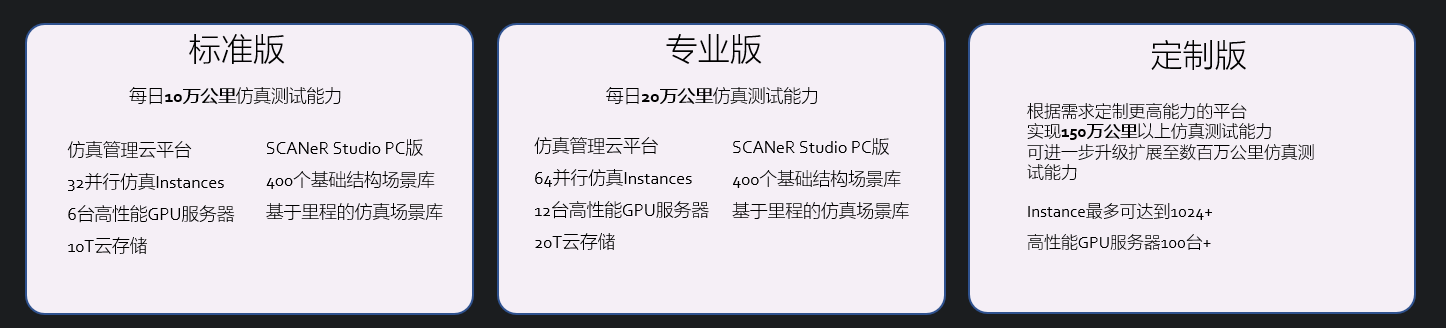
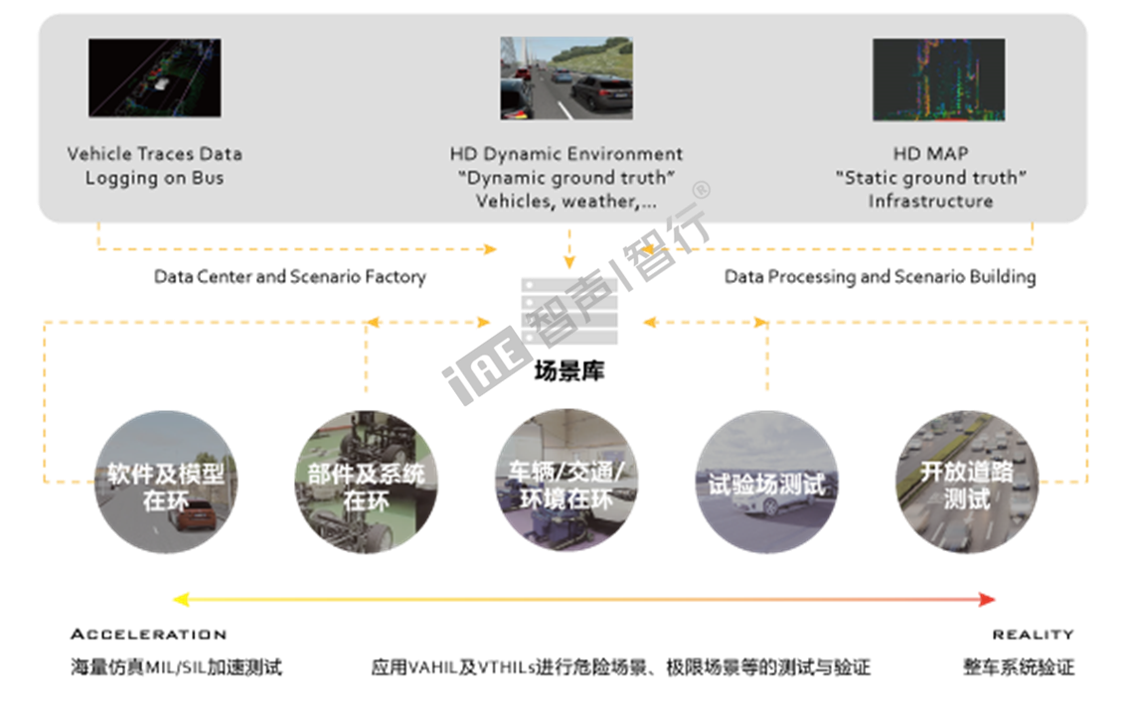
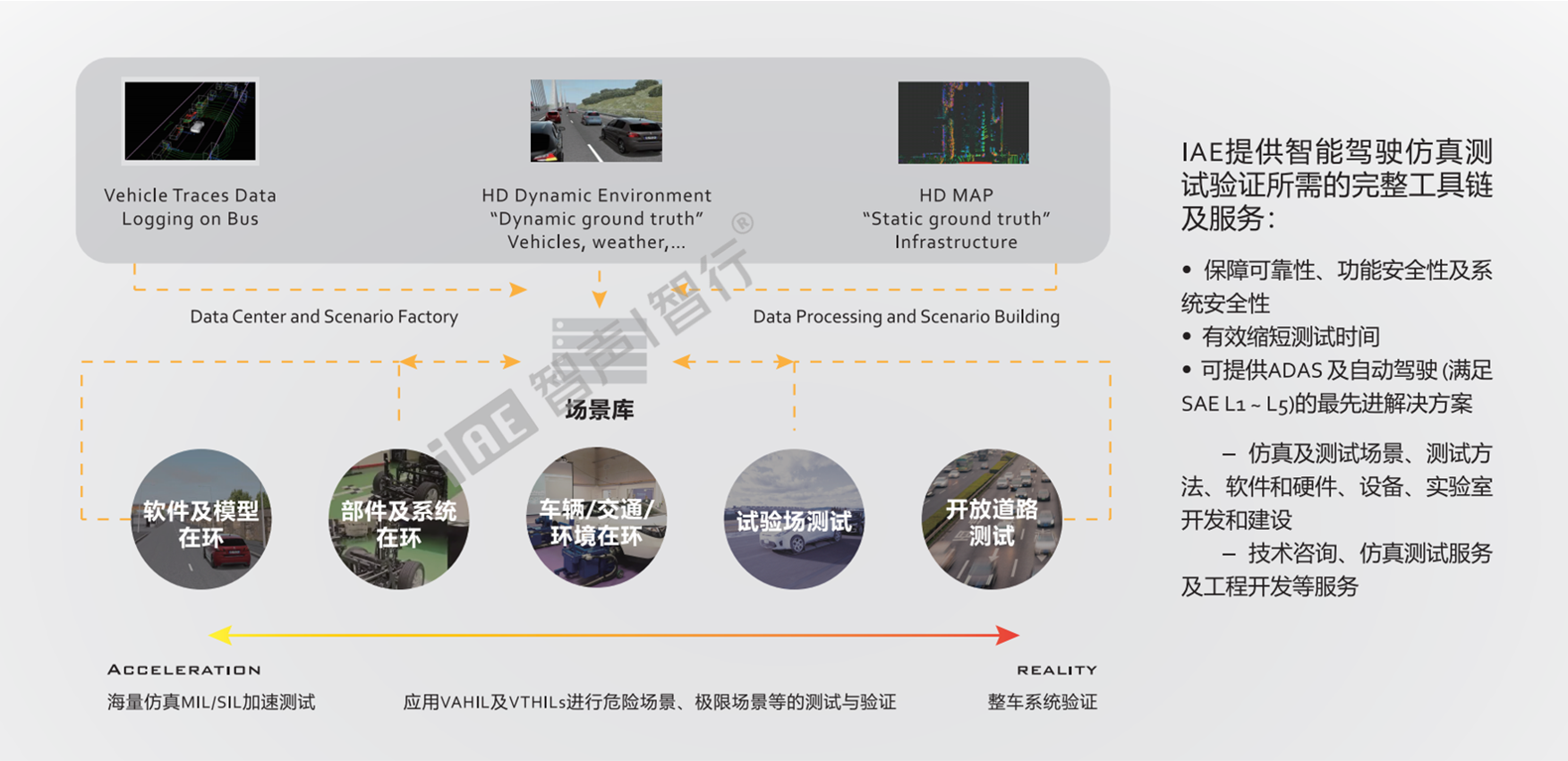
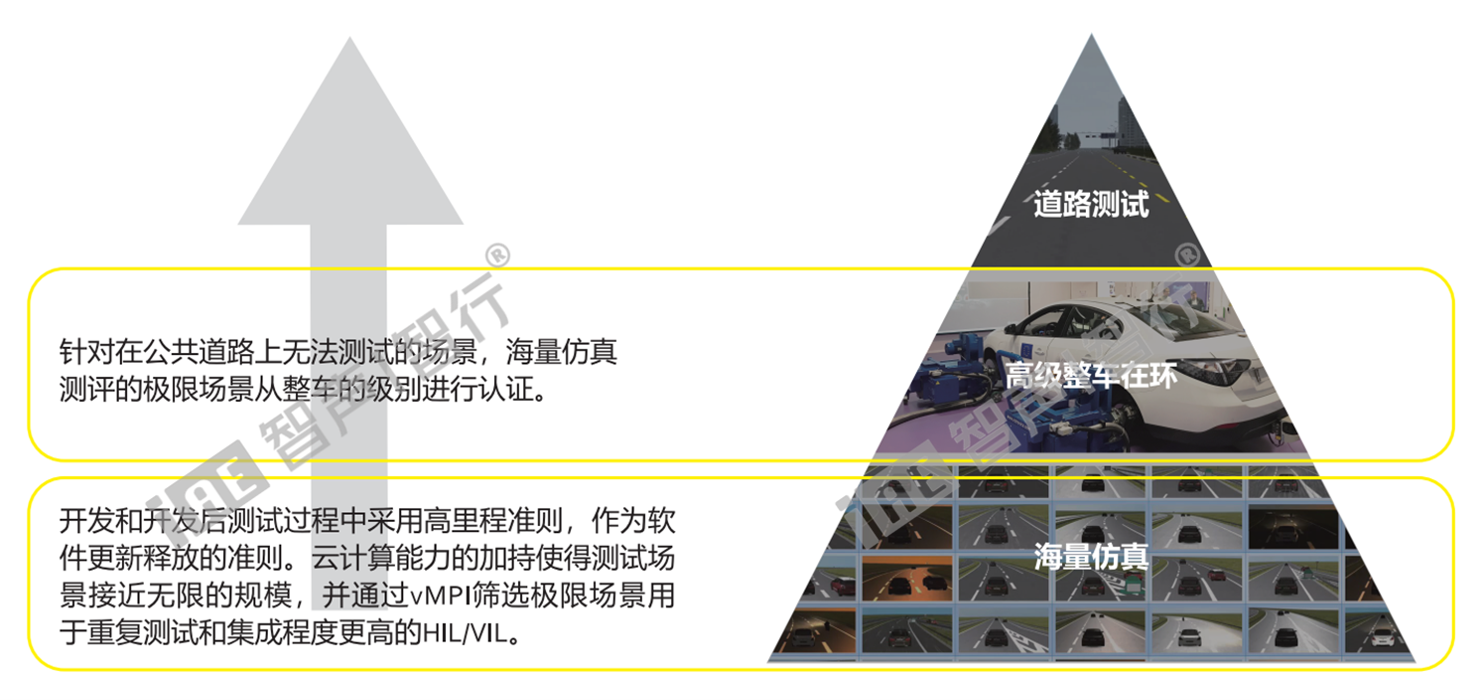
针对智能驾驶行业保障安全性、提升开发效率的迫切需求,IAE联合生态合作伙伴阿里云共同推出了基于云算力的海量仿真平台。有别于以往上云“仿真”仅能用于虚拟训练的目的,IAE海量仿真平台可实现日行几百万公里的仿真测试验证,能够有效缩短研发测试周期,加速系统安全性验证,让车辆测试更安全、高效、可靠。

演讲现场座无虚席
行业媒体专访 共同展现全栈式解决方案的魅力
IAE总经理安宏伟接受了汽车测试网的采访,介绍了IAE在智能驾驶仿真测试领域的技术优势和持续创新。
基于率先提出的X-in-Loop技术路线,IAE的云加速海量仿真、数字孪生场地车辆在环(VIL)和高级整车在环(VaHIL)等产品和方案,已被国内头部主机厂、第三方检测机构、政府测试示范区和高校等客户广泛采用。
同时,针对智能驾驶仿真测试以场景为驱动的特殊模式,以及对场景建设专业工具链的迫切需求,IAE融合信息技术领域专业的海量数据压缩、加密及云技术,从仿真对场景数据的实际要求出发,定义并开发了场景数据采集专用的iTT Plus平台,替代工控机等低效、非专业的数据采集方案,弥补了工具链上缺失的环节。
IAE总经理安宏伟先生接受《汽车测试网》专访
展会产品秀
云赋能的海量仿真平台

IAE携手阿里云共同推出基于云算力的海量仿真解决方案。基于双方强大的工程研发和部署能力,联合打造专业的云加速海量仿真解决方案(基于公有云及专有云平台),以解决智能驾驶日益增长的技术复杂性、场景多样性以及对于海量有效里程测试的迫切需求。

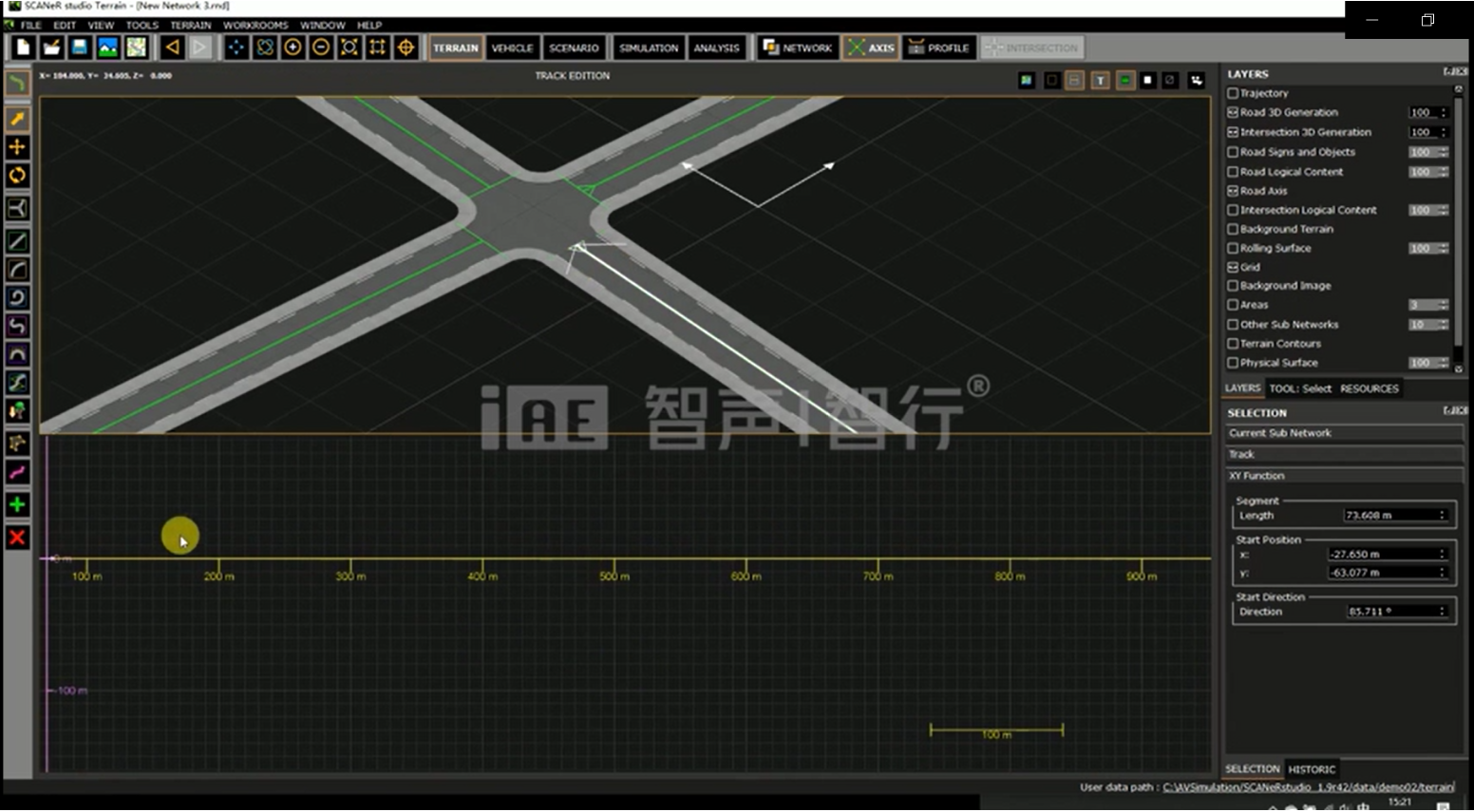
测试平台采用实时仿真系统运行车辆动力学模型(SCANeR Callas或第三方车辆动力学软件),采用高性能图形工作站运行仿真平台软件SCANeR Studio,两者同步仿真,模拟ADAS/AD HIL平台需要的各种传感器和场景。通过传感器数据注入设备IAE SensorSim,与ADAS/AD HIL平台形成完整的闭环测试系统。
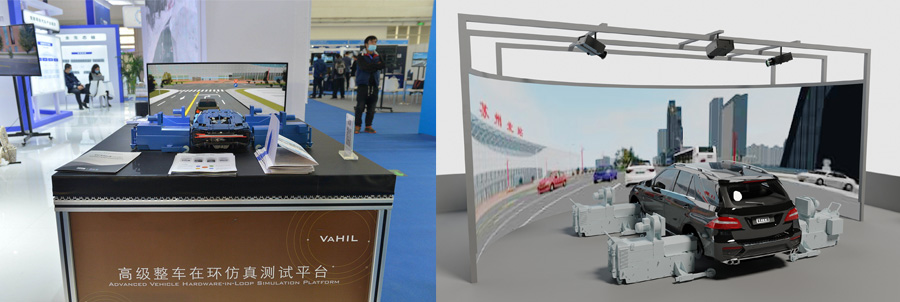
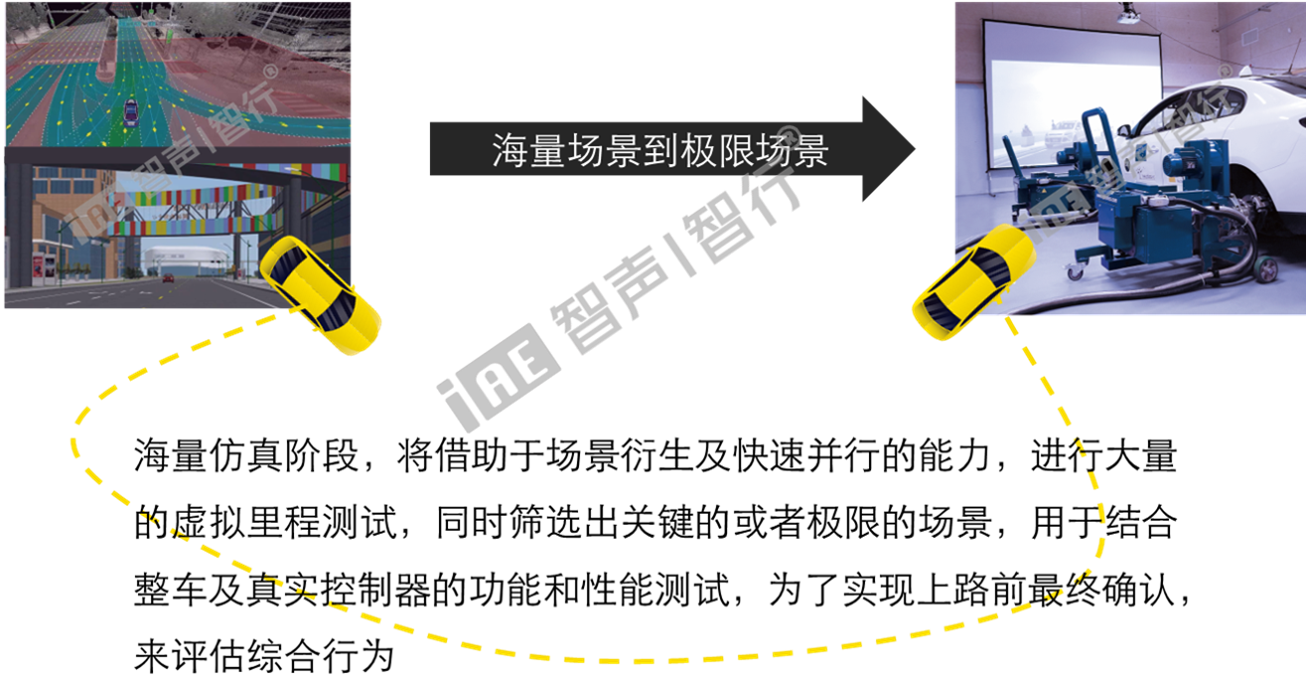
VaHIL – 高级整车在环实验室

VaHIL能够有效模拟并复现在实际道路上极难测试的各种极限和危险场景,可以满足ADAS和自动驾驶控制、决策及智行系统安全、高效测试和验证的需求,是智能驾驶产业化和安全落地的关键验证技术手段。该实验室主要由四驱移动式轴耦合测功机、转向模拟子系统、SCANeR仿真软件平台、环幕视景模拟子系统、车辆及传感器模型和传感器模拟子系统等组成。主要应用于智能驾驶算法及控制决策系统开发测试、真实转向模拟和制动模拟。
VTHILS实验室可以满足感知、控制和执行系统在真实自然环境下的开发和验证:
– 开发和验证感知、控制和执行系统在真实自然环境下的适用性;
– 用于智能驾驶系统环境模拟,尤其对于恶劣和极端(高湿热雨雾)天气环境下智能驾驶感知、决策控制、响应执行的应对能力;
– 可控精确度的天气环境模拟,有效用于智能驾驶系统的研发和测试;
– 用于智能驾驶环境传感器仿真建模和标定;
– 栏杆、建筑物、假人假车模拟,用于重构智能驾驶事故场景。
驾驶模拟器

驾驶模拟器用于智能驾驶及人机界面(HMI)的开发与测试,解决研发和设计早期阶段,研究和评估HMI特性的需要,能够对驾驶员显示信息、驾驶员输入操作装置、驾驶员疲劳及状态检测等HMI系统进行可用性、舒适度、系统级别等方面进行测试与评估。在智能驾驶开发中,更需要通过动态驾驶模拟器将驾驶员或乘客置于与真实道路环境非常相似的条件中,以唤起、测量、建模和理解人类、智能驾驶车辆以及道路基础设施之间的复杂关系。IAE可以提供从紧凑型、高动态到高保真驾驶模拟器的系列解决方案。
iTT Plus 场景数据采集系统
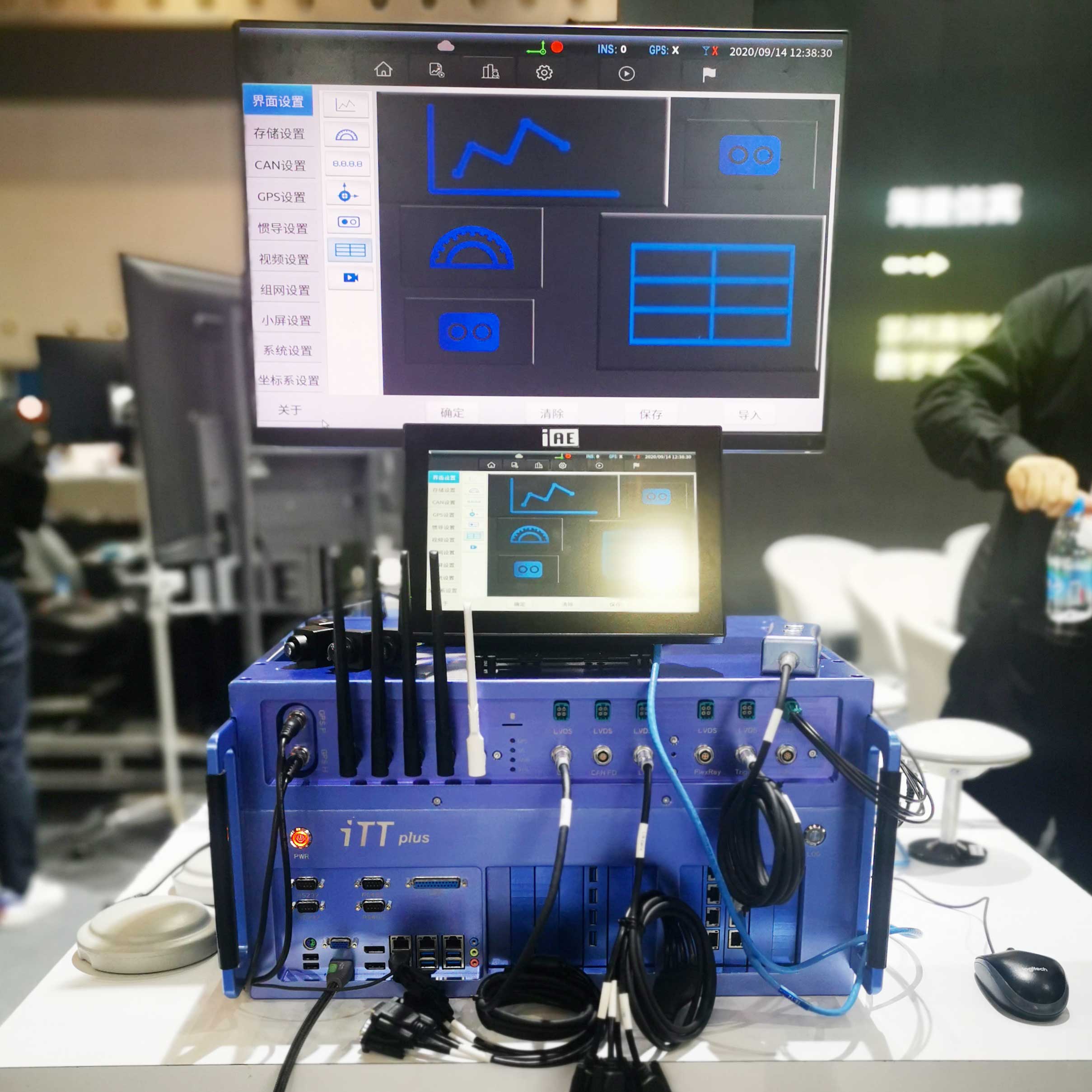
iTT Plus是一款集多功能、高带宽、高速率、海量数据存储能力于一体的车载数据采集平台,主要应用于智能网联汽车海量场景和道路测试数据的采集、分析和处理。系统支持PTP/PPS等多种硬件时间同步方法,可以实现对激光雷达、毫米波雷达、摄像头、GNSS定位等不同类型传感器数据的高速采集和同步。
软目标物产品系列

系列产品依据《Bicyclist Target Specification document version 1.0》、《Articulated Pedestrian Target Specification document version 1.0》等E-NCAP法规进行设计,符合交通目标物的外貌特征,能够有效模拟真实交通参与者的视觉反馈和雷达反馈效果。系列产品采用通用化和平台化设计,具备配件通用、快速搭建、碰撞后快速还原的特点,同类不同型号产品的配件可以直接更换和升级,避免迭代淘汰。
展会合作伙伴

展会的成功举办,离不开众多新老朋友的长期关注和支持,以及各位合作伙伴的积极参与配合。三天短暂的相聚让人意犹未尽。2021年9月1日-3日,国际汽车测试展将继续在上海世博馆H1馆举行,期待各界朋友们的再次莅临指导!让我们相约2021年!















 肖亚庆强调,工业和信息化部将把智能网联汽车作为汽车产业转型升级的重要战略方向,提升创新能力,优化政策环境,为实现产业高质量发展提供有力支撑。一是完善标准法规政策;二是构建产业创新生态;三是加快网联设施建设;四是深化国际交流合作。
肖亚庆强调,工业和信息化部将把智能网联汽车作为汽车产业转型升级的重要战略方向,提升创新能力,优化政策环境,为实现产业高质量发展提供有力支撑。一是完善标准法规政策;二是构建产业创新生态;三是加快网联设施建设;四是深化国际交流合作。