
自动驾驶仿真测试 – VTHILS应用简介
VTHILS:?Vehicle-Traffic Hardware-In-the-Loop Simulation,车辆-交通在环仿真测试平台,是介于虚拟测试和实车道路测试之间的一种方法,是智能网联汽车完整测试工具链中不可或缺的关键一环。VTHILS具有高效性、高可控性和高可重复性等特点,能够满足高危险场景测试、容错性测试等复杂高风险测试工况下的需求。VTHILS为智能网联汽车研发验证提供了全新的测试手段,同时也为测试方法和标准规范的研究提供了有效专业的支撑平台。
同时,扩展升级后的VTHILS+,还可对降雨、雾霾、阳光眩目等自然环境,车辆转向、变道、超车等驾驶行为和交通场景进行有效仿真测试。
基于VTHILS可以安全地进行ADAS/AV系统的开发、检测和验证,本文着重介绍了VTHILS系统的主要组成及其在ACC(Adaptive Cruise Control)系统测试中的实际应用。
使用VTHILS进行ACC系统评价
背景
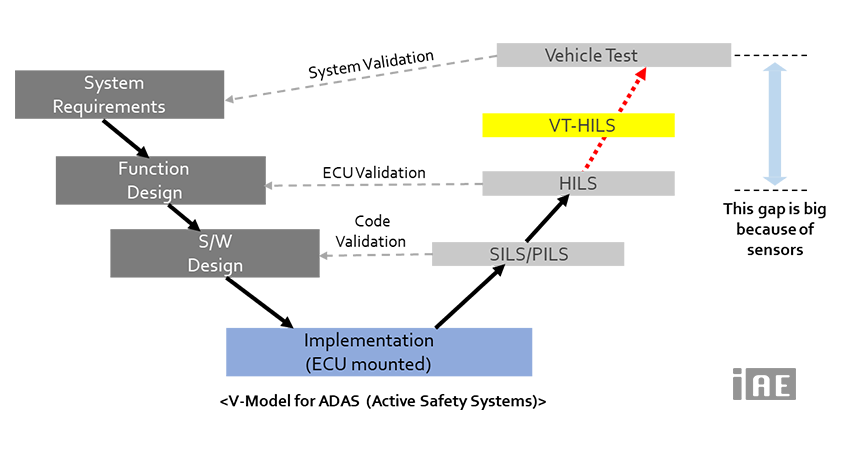
ADAS系统道路测试花费较大且风险较高,部件-系统级硬件在环测试(C/S HILS)适用于部件级验证,通常不能加入传感器和真实场景,与整车级实际道路测试存在很大差距。
针对这一问题,韩国汽车技术研究院(KATECH)设计并建造了VTHILS车辆-交通在环仿真测试平台,基于实车和真实传感器(摄像头、雷达或激光雷达等)在可控实验室环境下进行ADAS系统及自动驾驶测试和验证。
VTHILS系统架构
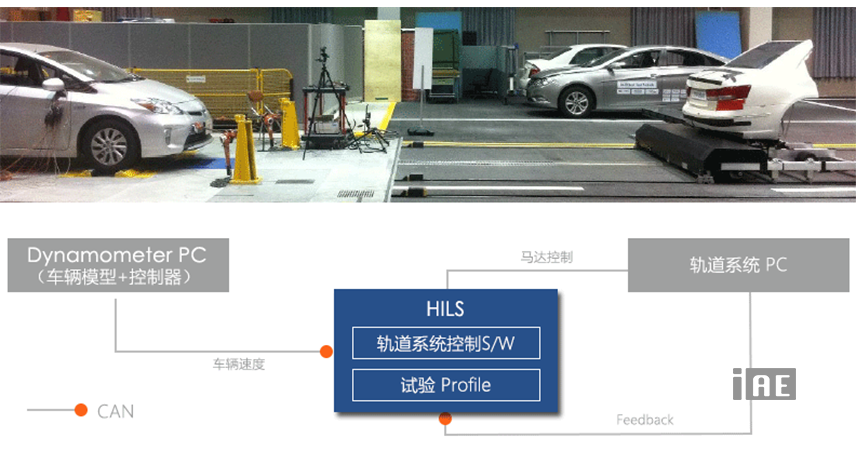
VTHILS系统主要包括四驱转鼓测功机、移动目标和集成控制系统,以及附属功能设施:
- 四驱转鼓模拟道路,对测试车施加路面载荷。测试车安装在转鼓上,前后固定,由驾驶机器人控制,保证安全。
- 移动目标模拟交通,在导轨上沿纵向和侧向相对于测试车运动,用于被ADAS传感器探测。系统设置两条导轨+自由移动平台,可进行多目标测试。
- 集成控制系统用于搭建、管理和实施测试场景,包括试验车车速/加速度、目标车车速/加速度、车距、位置、车辆相对运动等等。并控制转鼓测功机和移动目标进行联动。系统通过物理层和控制层保证测试安全。
ACC测试
基于VTHILS进行自适应巡航控制系统ACC(Adaptive Cruise Control)传感器和控制器的测试。
- 测试车布置在转鼓测功机上。两辆目标车分别布置在前方和右侧车道。
- 车载雷达探测前方的移动目标。
- 集成控制系统通过控制试验车和目标车的相对位置和速度,进行多种工况的测试,如:
- 不同的交通场景,包括车辆切入、变道、跟随和启停。
- 不同车速和相对车速。

结论
- 利用VTHILS可以在多种场景下对ACC控制系统和雷达传感器进行测试和评价。
- 通过可控、高效和可重复的室内试验,保证了ADAS系统测试的安全性和可重复性,加速了ADAS系统的开发和应用。
KATECH VTHILS实验室简介
VTHILS是KATECH(Korean Automotive Technology Institute)设计并建造的,可在室内可控环境下对感知系统(自动驾驶传感器、控制器)进行整车级的开发和验证,填补了部件测试到实车路测间的空白。
