苏州高铁新城传出好消息——IAE落户相城了!
IAE是什么企业?
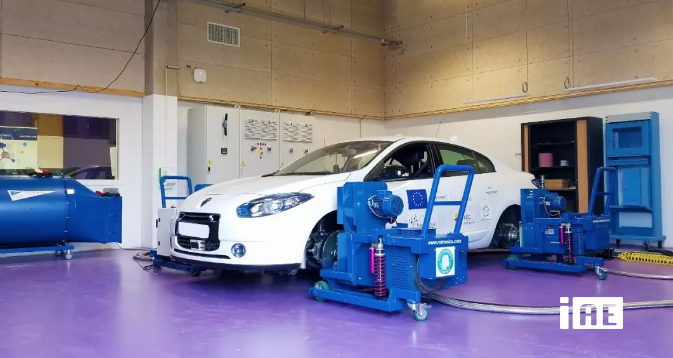
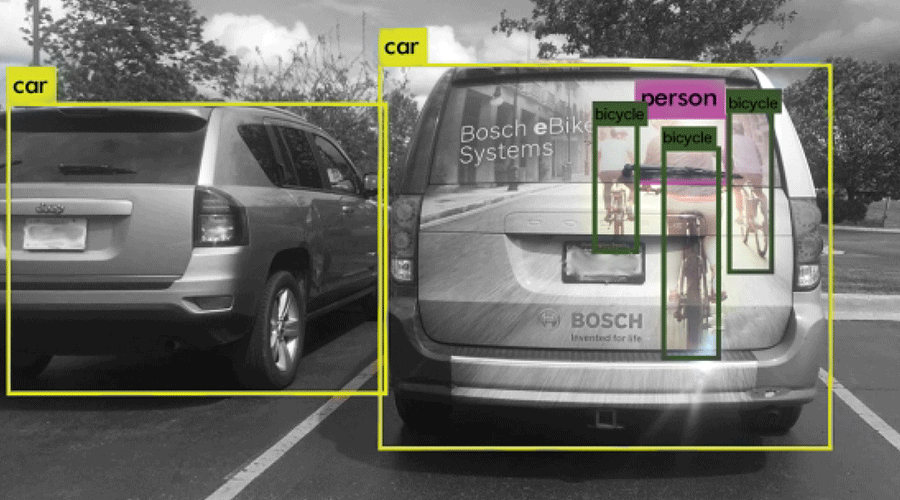
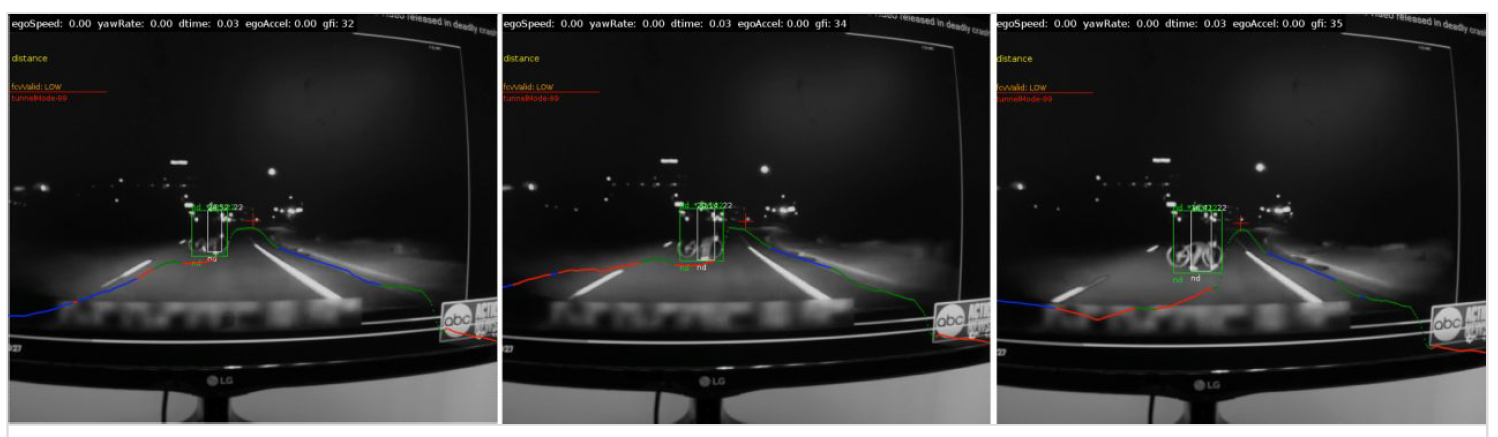
这次总部落户苏州高铁新城的企业IAE(智行众维智能科技有限公司),是一家智能驾驶仿真测试企业,同时在北京、上海、美国底特律和奥地利萨尔茨堡设有研发中心。
依托雄厚、扎实的技术实力以及专业的解决方案,IAE服务于中国的智能网联汽车行业,助力智能驾驶技术的真正落地。
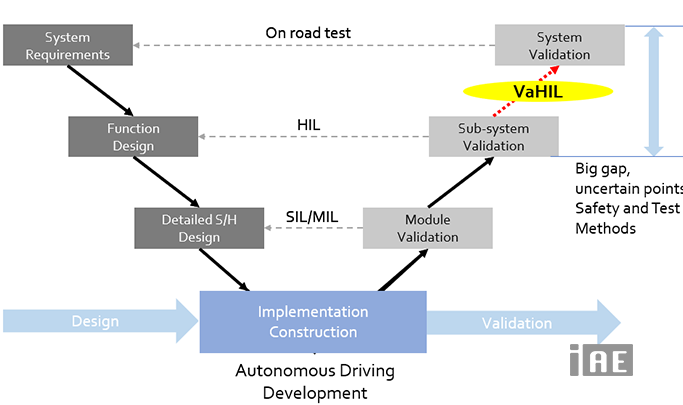
IAE作为一家科技创新型企业,为此次中心成立搭建了桥梁,公司设在奥地利萨尔茨堡的研发中心,已开发出目前具有技术代表性的智能驾驶仿真、测试与验证的完整技术平台。
4月19日,中奥智能驾驶创新中心成立庆典暨IAE总部开业仪式在苏州高铁新城举行。

本次活动由苏州高铁新城管理委员会、奥地利汽车产业集群联合会主办。
奥地利驻上海总领事馆总领事Brigitte ROBINSON,中国汽车技术中心原主任赵航,相城区委常委、高铁新城党工委书记苏学庆等出席活动。
IAE总部启动仪式

奥地利驻上海总领事馆总领事Brigitte ROBINSON,相城区委常委、高铁新城党工委书记苏学庆,苏州智行众维智能科技有限公司(IAE)董事长王耀东,苏州智行众维智能科技有限公司(IAE)创始人安宏伟,奥地利驻上海总领事馆商务领事Christina SCHOSSER,奥地利汽车产业集群联合会国际关系负责人Frederic HADJARI,IAE奥地利分公司CEO Klaus BERNKOPF共同启动IAE总部。
中奥智能驾驶创新中心揭牌
随着IAE的加盟,为苏州高铁新城与奥地利智能驾驶企业之间搭建了一座技术合作、创新协同的桥梁。现场,中奥智能驾驶创新中心也应运而生。

奥地利汽车产业集群联合会国际关系负责人 Frederic HADJARI与中国汽车技术中心原主任 赵航,共同为中奥智能驾驶创新中心揭牌。
借助IAE这一技术平台与此次成立的中奥智能驾驶创新中心这一合作实体,未来苏州高铁新城的交通场景将出现在奥地利研发团队的测试工作中,为计划在中国推广技术和产品的欧洲智能驾驶科技企业提供中国真实交通仿真测试数据和仿真测试服务。
相城区委常委、高铁新城党工委书记苏学庆表示,高铁新城的枢纽区位、便捷交通、优质的产业生态、完善的产业配套等为建设智能驾驶产业高地提供了强大的支撑。

“今天成立中奥智能驾驶创新中心是加强国际创新合作、实现共赢发展的重要探索。”
奥地利驻上海总领事馆商务领事Christina SCHOSSER:

“此次中奥智能驾驶创新中心的成立意义深远,既有助于两国贸易往来,又推动两国智能驾驶技术落地。希望在既有的智能驾驶产业合作基础上取得突破性的进展。”
苏州智行众维智能科技有限公司(IAE)董事长王耀东在发言中着重介绍了与高铁新城的合作方向。

“中奥智能驾驶创新中心是为服务高铁新城、服务奥地利及欧洲智能驾驶行业而成立。
未来,将有更多智能驾驶研发团队到高铁新城集中测试最新技术。IAE还将与高铁新城共同建设仿真测试与验证中心,帮助智能驾驶安全落地。”
据了解,此次落地的IAE总部以及即将展开合作的奥利地科技创新企业,将在相城共同创建专业的智能驾驶虚拟仿真测试平台,实现智能驾驶测试加速,突破测试里程对技术落地的制约。
会前,与会行业专家参观考察了位于苏州港口发展大厦面积约1500平方米的IAE苏州总部办公区域,并举行了技术沙龙活动。

新闻转自:今日相城