
智能驾驶系统实验室仿真测试,让上路的车变“聪明“点儿
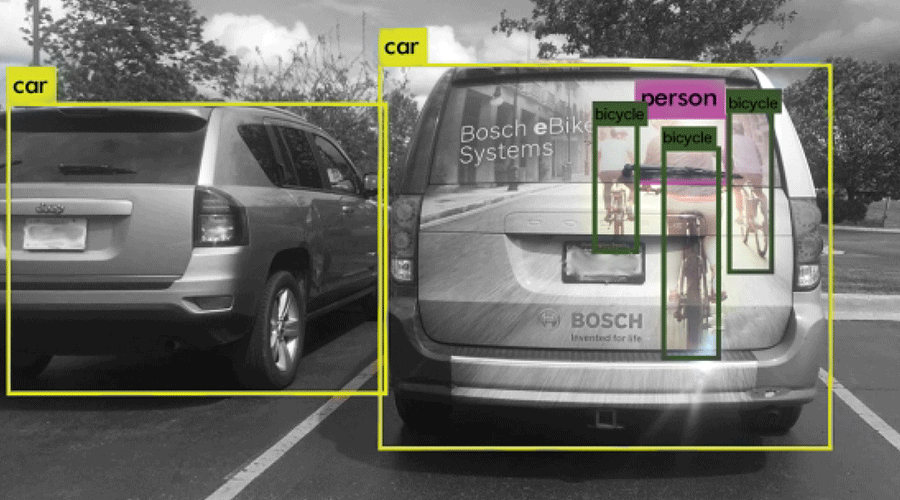
如果自动驾驶车辆面对这样一辆印着自行车的SUV,它将看到什么?
多传感器融合的情况下,它将一会儿看到SUV一会儿看到自行车。
自动驾驶车辆面对这样的情景会产生什么行为?
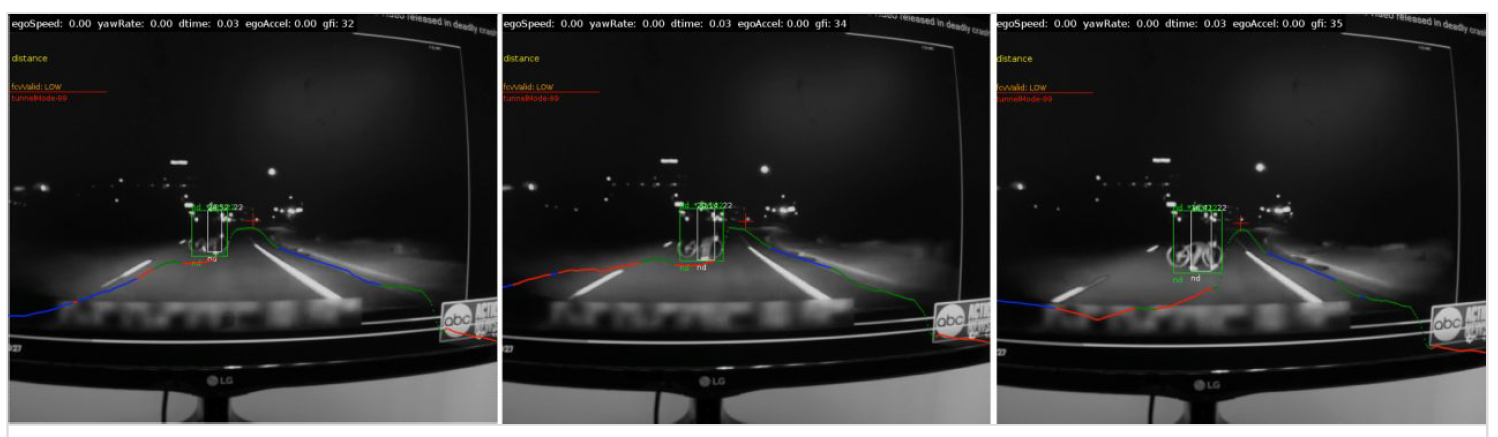
MOBILEYE分析结果
面对极端案例在实际道路测试中的安全风险及难以重复性,如何让决策系统在应对极端案例时的行为更有保障?
智行君带您走进VaHIL仿真测试实验室,在这里可以通过重复性的测试,让系统算法得以修正或让系统得到深度学习。

VaHIL架构

VaHIL仿真测试
VaHIL通过仿真软件可以模拟各类极端案例,模拟传感器信号,将信号传输给自动驾驶控制器,验证决策系统行为和车辆接收决策系统信号后的执行效率。环境仿真部分由AVS(原Oktal)公司的SCANeR Studio仿真软件提供,Rotronics的轴耦合式测功机作为整车执行机构。
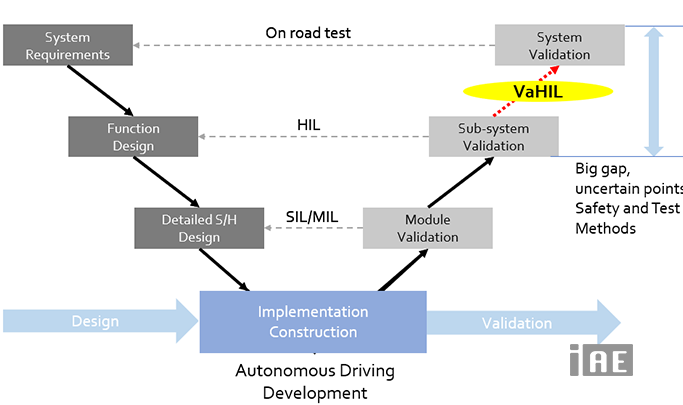
自动驾驶汽车开发流程
VaHIL起先应用于雷诺集团、法国CNRS和贡比涅大学联合创建的SIVALab实验室中,其自动驾驶研发过程中,每次算法更新上路测试之前都需要先通过VaHIL台架的测试验证,让上路测试的车能够变聪明点儿。
这样的实验室测试正好弥补了子系统测试和实际道路测试之间缺少的环节,为实际道路测试提供更多保障。
系统失灵事件甚至事故,不应该只存在于系统失灵报告中,100亿英里的路试可以得到更多的安全保障。自动驾驶技术的成熟需要我们更多的思考和更多的努力。